 电子发烧友App
电子发烧友App


目前,调平技术都已逐步成熟,但随着武器机动性要求的不断提高,也相应提高了对调平时间和调平精度的要求,与之相适应的自动控制调平技术也不断发展。自动调平系统的发展方向主要是:
(1)精确性:系统的精确性主要取决于倾角传感器的分辨率。随着新结构、新材料、新工艺和新技术在高精度倾角传感器中的应用,倾角传感器的性能大幅度地提高了,倾角传感器正从传统的液体摆、气体摆原理向伺服加速度及力平衡、重力摆原理发展,倾角传感器的分辨率已达到0.001度或更高。
(2)稳定性:为了适应现代武器高机动性和快速反应能力的需求,要求车载平台有更高的稳定性,采用机电伺服系统代替电液伺服系统,加上单片机系统可靠性与抗干扰技术的不断发展,奠定了单片机系统稳定可靠工作的基础。尤其是计算机与传感器技术的发展,使高稳定性的调平系统得以实现。
(3)快速性:目前,倾角传感器的响应速度已显著提高,新型倾角传感器响应时间达到了5毫秒,响应速度为200次/秒,再加上在系统中应用先进控制算法,都使得调平系统的调平时间大大缩短了,也就提高了武器系统的快速性。
(4)可操作性:在自动调平系统中设计有人机交互显示面板,通过其图形界面显示系统的状态及各种实时参数,并根据工作需要对系统进行参数设置。面板设置有多个功能键,可根据需要自由定义,实现调平系统的各种操作。这些都将使系统的可操作性得到大大提高。
车体调平装置总体设计
火箭炮车体调平装置总体设计包括:倾角传感器的选型、数据处理与无线数传电路设计。车体调平装置机壳采用铝合金整体加工,内置倾角传感器、电路板、电池和无线发射模块等,水平检查座与机壳由螺钉固连,采用优质合金钢,表面光洁度和水平度优于水准仪标准,发射机天线位于机壳的上方,使用时旋拧上,装箱时可以折叠放倒或旋拧下。车体调平装置控制原理如图1所示。
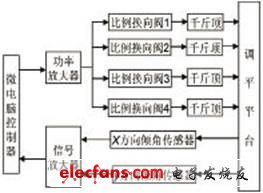
图1 车体调平装置控制原理图
倾角传感器及传感器包数据输出格式
倾角传感器选型
倾角传感器用于感应火箭炮车体的纵横向倾斜度,基本技术要求:①精度高于±0.012°;②使用环境温度为﹣40℃~﹢55℃。根据这些要求,选用北京星网宇达科技公司的TW-TS1110倾角传感器。该传感器内部采用高速数字处理器,对多维重力加速度信息进行处理与姿态角解算,并采用角度数字输出模式,输出速度为5Hz,测量范围为±15°。测量精度:当倾角≤±5°时,精度为±0.005°;当倾角≤±15°时,精度为±0.01°;当倾角≤±30°时,精度为±0.035°。传感器利用光刻电阻技术补偿非线性误差,解决了传统倾角传感器只有在小范围才能保证精度的现象,使得倾角传感器在全测量范围内线性化,保持同一额定精度指标。传感器还采用启动零位测试补偿技术,具有快速稳定输出能力,单点重复性为0.0015°;采用动态数字滤波技术,输出噪声低,且具有较高的分辨率,分辨率为0.002°,传感器内部采用动态零位与标度因数自校正技术。适合多种环境使用,使用环境温度为﹣40℃~﹢55℃。
传感器包数据输出格式
1 发送数据格式定义
①ASCII码发送格式(单角度):24 FF XX XX XX XX XX 0D 0A
说明——24:头标识$;FF:角度值的符号位(+2b/-2d);XX:ASCII码角度值(30~39);0D 0A:角度发送字尾标识符(换行,回车)。
②二进制码发送格式(单角度):AA XX XX CC
AA:角度发送字头标识符;XX:带符号二进制数。5度倾角标度:6000bit/度;15度倾角标度:2000bit/度;30度倾角标度:1000bit/度;60度倾角标度:500bit/度。
CC:校验码;CC=数据字节1+数据字节2。
2 接受命令格式定义
读角度命令格式如图2所示。该命令仅在应答工作模式下有效。每个传感器都有固定ID字(FFFF)和用户ID字(用户可设定,初始为0000),2个ID字都可读角度。

图2 读角度命令格式
数据处理与无线数传电路设计
无线数传系统是无线数字传输系统的简称,该系统以无线数传模块为平台,在不影响装备功能情况下,实现数字终端之间数字信息的无线传输。数据处理与无线数传的主要任务是接收倾角传感器的数据输出,计算每个千斤顶相对车体水平面所要调整的角度,并通过无线数传模块传输给操纵指示器。










 工商网监
工商网监
评论