mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15:24 41330
41330 MPU6050姿态融合解算(DMP)
2021-12-06 13:21:10 32
32 MPU6050模块自己写 卡尔曼滤波和姿态解算 难吗? 大概多久能搞出来?
2017-12-22 17:35:23
本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比较实用的工程方法。
2017-12-11 13:51:3441050 
MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2021-12-06 11:51:1166 本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、DMP姿态解算后的俯仰角、横滚角和航向角。
2017-12-11 14:26:5234513 
本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57:3170608 
MPU6050程序,想了解、想要的小伙伴赶紧看看哦!
2015-12-15 13:51:5837 本程序是基于Mpu6050,所做的四元数结算 相当稳,希望对大家有所帮助
2016-08-17 10:36:5590 文章目录1 简介2 MPU60503 工作原理4 单片机与MPU6050通信4.1 mpu6050 数据格式4.2 倾角计算方法5 实现代码6 最后1 简介Hi,大家好,这里是丹成学长,今天向大家
2021-12-06 12:51:109 C语言 | 基于STM32的MPU6050模块程序(主程序)
2021-12-06 15:06:1245 移植正点原子mpu6050代码,总是MPU6050初始化失败解决首先观察正点原子MPU6050代码,发现它在读取MPU6050数据的同时,还将数据通过串口发送给上位机进行调试,而我们移植
2021-12-06 11:51:1237 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3070 MPU6050的DMP自检与姿态换算的问题
2021-12-06 16:51:1116 MPU6050陀螺仪使用( 原理图代码 )
2015-10-29 15:24:4690 最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,运算量相对较大),方便在STM32主控上实现,可以转换成四元数表示。
2017-11-07 10:39:3017853 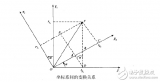
mpu6050详细源码,配有电路图以及初始化C语言程序。详细的mpu6050中文资料!
2016-02-18 11:53:2090 MPU6050( )
2021-12-06 15:06:1123 MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
2023-08-07 15:46:561 对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
2023-06-15 15:03:39884 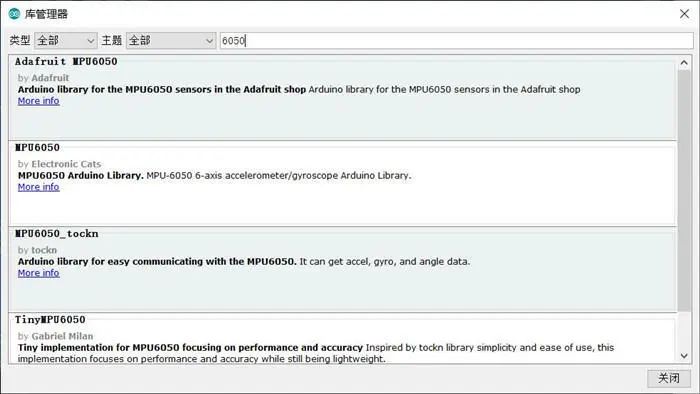
轴当前的姿态. 所以,MWC的源程序里面也就没有使用 MPU6050的 DMP进行计算姿态. 笔者为了计算做产品. 研究了很长时间的MWC源程序始终没看懂. 后来不得已.最终在同事的劝说下.鼓起勇
2021-12-06 16:51:101 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 15:36:096 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 12:06:080 为避免纠缠于电路细节,我们直接使用集成的MPU6050模块。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。
2017-11-07 14:25:066679 InvenSense公司的三轴陀螺仪MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
2017-11-07 14:01:265584 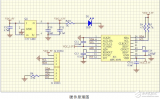
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42:3325602 MPU6050 相关资料 源程序 原理图
2015-11-11 11:48:3933 # MPU6050常见问题的分析与处理本文主要针对STM32使用MPU6050过程中产生的问题进行分析和处理,部分内容也适用于其他单片机。本文基于MPU6050自带的DMP算法。文章内容对于MPU6050调试过程有一定的帮助。
2021-12-06 12:21:0639 MPU6050 用51单片机串口测试程序,通过1602显示数据
2016-04-28 14:57:0932 MPU6050使用卡尔曼滤波的方法介绍,使用卡尔曼滤波获得的姿态角更准确
2016-06-01 11:29:20145 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏
2021-12-06 12:06:0733 ——来自迪文开发者论坛用户本方案使用COF屏的IO口模拟I2C信号与MPU6050通讯,实现航空姿态仪表可视化显示。MPU6050采集数据,T5L0芯片进行数据读取和滤波算法处理,计算出姿态数据
2022-05-31 11:30:30536 
MPU6050模块,如图 1所示。该模块集成了一片MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8
2017-11-07 14:06:4113602 MPU6050数据手册,规格说明
2022-03-09 15:03:5482 电子发烧友网站提供《MPU6050教程开源分享.zip》资料免费下载
2023-06-25 15:18:144 本文档的主要内容详细介绍的是使用Arduino读取MPU6050数据的程序免费下载。
2019-07-24 17:17:3927 10 9 8,再对应位置b.移位n*42.将配置的GPIO口更改一下百度网盘mpu6050代码 2222...
2021-12-06 15:51:084 前段时间由于项目需要,需要使用cc2530通过IIC读取MPU6050的数据。发现网上并没有代码,很多帖子都不是大家需要的,所以我想把我的cc2530驱动MPU6050的代码粘出来与大家共同学习。我
2021-12-06 16:51:1035 文章目录硬件环境头文件代码源文件代码简单举例硬件环境MPU6050.SCL->接STM32F407.PB8MPU6050.SDA->接
2021-12-06 11:51:1212 本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07:1140722 MPU6050原理图,PDF格式,还蛮清晰。
2016-03-24 17:25:3797 四路dmp的mpu6050的STM32F103程序
2017-02-28 21:08:1013 本文档的主要内容详细介绍的是MPU6050 DMP的使用程序详细资料免费下载。
2018-11-01 16:19:35111 STM32 MPU6050 平衡车
2021-12-06 14:51:1057 MPU6050开发 -- 数据分析
2021-11-30 11:21:0422 使用MPU6050硬件DMP解算姿态是非常简单的,下面介绍由三轴陀螺仪和加速度计的值来使用四元数软件解算姿态的方法。我们先来看看如何用欧拉角描述一次平面旋转(坐标变换):MPU6050的四元数解算
2021-12-06 12:36:0623 STM32获取MPU6050数据
2021-12-06 13:06:1646 毕业论文 | 基于MPU6050及卡尔曼滤波的平衡小车设计(源代码与设计文档)
2021-11-21 20:06:0920 MPU6050基于STM32,程序中加入MPU的官方库DMP,计算出欧拉角,可在串口助手中观察欧拉角的变化
2017-03-01 12:48:3757 最新MPU6050资料V5,包括上位机,PCB库,示例程序(PC版,STM32,Arduino版)
2016-06-22 16:28:2826 本文开始介绍了mpu6500的定义与MPU6500驱动总结,其次阐述了mpu6050的定义与mpu6050感测范围,最后介绍了mpu6500和mpu6050的区别。
2018-03-08 09:54:0286385 本文档的主要内容详细介绍的是采集MPU6050 DMP数据功能的C语言程序免费下载,对于 MPU6050和自带的DMP数据读取迷茫的小伙伴可以了解一下。
2018-12-10 08:00:0024 毕业论文 | 基于STM32的MPU6050程序设计(源码)——卡尔曼滤波
2021-12-06 12:06:0839 MPU6050资料,有关MPU6050的介绍。
2015-12-10 18:20:1232 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏自动...
2021-12-06 17:06:1016 ,从无到有,包含了一些我调试代码的过程。分享一些坑吧,很多都是读不出来啥的,其实模块一般没啥问题,我会一步一步地教大家怎么排除常见问题。我是参考正点原子的代码,因为他们没教怎么移植DMP简述一下mpu6050和stm32的一些坑吧TB上mpu6050也不贵,就那么几块钱,模块几乎都一模一样
2021-12-06 12:36:0714 将数据通过串口发送到计算机,每一组数据50ms。本操作过程简单,方便移植.0.96寸IIC显示屏接PA5:SCK,PA7:SDA,陀螺仪接PB6/7,串口为PA9/10,本程序代码开源。 STM32读取MPU6050角度
2021-12-06 12:21:0737 电子发烧友网站提供《使用MPU6050平衡LED项目.zip》资料免费下载
2023-02-08 15:34:054 本文档的主要内容详细介绍的是MPU6050传感器的源代码合集免费下载。
2020-01-03 16:22:2945
正在加载...
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论