 电子发烧友App
电子发烧友App


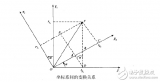
一、四元数法
关于四元数的一些概念和计算就不写上来了,我也不懂。我能告诉你的是:通过下面的算法,可以把六个数据转化成四元数(q0、q1、q2、q3),然后四元数转化成欧拉角(P、R、Y角)。
虽然MPU6050自带的DMP库可以直接输出四元数,减轻STM32的运算负担,这里在此没有使用,因为我是用STM32的硬件I2C读取MPU6050数据的,DMP库需要对I2C函数进行修改,如DMP库中的I2C写:i2c_write(st.hw-》addr,st.reg-》pwr_mgmt_1,1,&(data[0]));有4个输入变量,而STM32硬件I2C的I2C写为:voidMPU6050_I2C_ByteWrite(u8slaveAddr,u8pBuffer,u8writeAddr),只有3个输入量(这之间的差异好像是由于MPU6050的DMP库是针对MSP430单片机写的),所以必须进行修改,但是改固件库是一件很痛苦的事,你们应该都懂。当然,如果你用模拟I2C的话,是容易实现的,网上的DMP移植几乎都是基于模拟I2C的。
要注意的的是,四元数算法输出的是三个量Pitch、Roll和Yaw,运算量很大。而像平衡小车这样的例子只需要一个角(Pitch或Roll)就可以满足工作要求,个人觉得做平衡小车最好不用四元数法。
#include《math.h》
#include“stm32f10x.h”
//------------------------
//变量定义
#defineKp100.0f//比例增益支配率收敛到加速度计/磁强计
#defineKi0.002f//积分增益支配率的陀螺仪偏见的衔接
#definehalfT0.001f//采样周期的一半
floatq0=1,q1=0,q2=0,q3=0;//四元数的元素,代表估计方向
floatexInt=0,eyInt=0,ezInt=0;//按比例缩小积分误差
floatYaw,Pitch,Roll;//偏航角,俯仰角,翻滚角
voidIMUupdate(floatgx,floatgy,floatgz,floatax,floatay,floataz)
{
floatnorm;
floatvx,vy,vz;
floatex,ey,ez;
//测量正常化
norm=sqrt(ax*ax+ay*ay+az*az);
ax=ax/norm;//单位化
ay=ay/norm;
az=az/norm;
//估计方向的重力
vx=2*(q1*q3-q0*q2);
vy=2*(q0*q1+q2*q3);
vz=q0*q0-q1*q1-q2*q2+q3*q3;
//错误的领域和方向传感器测量参考方向之间的交叉乘积的总和
ex=(ay*vz-az*vy);
ey=(az*vx-ax*vz);
ez=(ax*vy-ay*vx);
//积分误差比例积分增益
exInt=exInt+ex*Ki;
eyInt=eyInt+ey*Ki;
ezInt=ezInt+ez*Ki;
//调整后的陀螺仪测量
gx=gx+Kp*ex+exInt;
gy=gy+Kp*ey+eyInt;
gz=gz+Kp*ez+ezInt;
//整合四元数率和正常化
q0=q0+(-q1*gx-q2*gy-q3*gz)*halfT;
q1=q1+(q0*gx+q2*gz-q3*gy)*halfT;
q2=q2+(q0*gy-q1*gz+q3*gx)*halfT;
q3=q3+(q0*gz+q1*gy-q2*gx)*halfT;
//正常化四元
norm=sqrt(q0*q0+q1*q1+q2*q2+q3*q3);
q0=q0/norm;
q1=q1/norm;
q2=q2/norm;
q3=q3/norm;
Pitch=asin(-2*q1*q3+2*q0*q2)*57.3;//pitch,转换为度数
Roll=atan2(2*q2*q3+2*q0*q1,-2*q1*q1-2*q2*q2+1)*57.3;//rollv
//Yaw=atan2(2*(q1*q2+q0*q3),q0*q0+q1*q1-q2*q2-q3*q3)*57.3;//此处没有价值,注掉
}













 工商网监
工商网监
评论