

















3D并不是什么新技术,在消费电子领域已有广泛的应用,但在汽车应用中却处于起步阶段,仍需要相关技术和解决方案有所突破。以汽车安全驾驶应用为例,在驾驶过程中,人的视线死角是难以消除的,如果能够对汽车4个方向的高分辨率摄影机影像进行3D合成,以让驾驶员根据不同驾驶情景自由改变视角,得到更广阔的驾驶视线,就可以准确预测路况,大大降低各种交通事故的发生。采用高分辨率摄像机的驾驶辅助功能全方位立体监视系统就是这样的解决方案,有助于实现安全驾驶。
3D及其在汽车中的应用
3D基于人对空间和物体的认知,是有深度、全视角的。3D可使人们获得更直观和互动的体验。生成3D图像需要复杂精尖的图像显示控制器(Graphic Display Controller,GDC),而它又需要一个几何单元和结构处理单元。将这些元素整合到一个图像引擎中可提供最佳性能,如图1所示。

图1:图像显示控制器(GDC)框图
目前,许多最好的图像控制器对2D和3D图像都能驾驭。但在许多情况下,系统设计者并没有充分利用已有的3D功能,而这一功能可以给终端用户带来许多益处。例如,驾驶者想要了解泄气的车胎或不亮的车灯情况,应用2D技术就需要数百兆字节的预置2D图像。
而利用3D技术,所有这些及更多要求只需不到一兆字节的图像和几何数据就可轻松解决。作为该技术的领先者,在嵌入式图像市场有十多年经验的富士通设计、开发并帮助客户集成领先的2D和3D图像显示控制器。

图2:利用3D图像,单一物体可以旋转至任何角度,缩放至任意大小,突出任意部位
通过使用图像芯片的几何引擎,这一模型现在可以任何方式进行动画模拟、从任何角度进行位置摆放。只要拥有3D模型(多边形网格和纹理绘图),无需提供任何其它数据,就能全方位地展示3D模型。通过沿着3D模型的三个轴进行缩放、旋转和转换,可以获得无限量的图像数据。正如之前指出的,无需昂贵的闪存或系统存储器,就可呈现车胎数据、故障的车灯和车门状况等任意数量的信息和提示。
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!

选择合适的GDC
为了达到最佳的显示效果和图像流畅性,选择正确而且合适的绘图显示控制器就变得尤为重要了。
从3D着色到影像变形,目前GDC的功能通过各式各样的应用呈现在使用者的眼前。高档图像显示控制器可塑造出让消费者目眩神迷的影像,其他等级的GDC能明确而简单地显示资讯,让使用者一目了然看到自己想要的信息。GDC可根据其性价比分成下列三类:低档为QVGA荧幕,预先着色的图形,可包括影像输入功能;中档为WVGA荧幕,以2D动态绘图为主,也可支持3D,有影像输入功能;高档为SXGA或更高解析度的荧幕,动态3D绘图,多重影像输入。
实现应用中完美图像功能的第一步,是针对应用目标选择一款适合的GDC,并以合理的价位获得所需功能。值得注意的是,汽车产业是成本相对敏感的应用领域,对于系统研发业者而言,最重要的工作就是降低零组件(BOM)成本。就低档到中档GDC而言,研发者可采用系统单芯片(SoC)绘图控制器来满足要求,但由于内部VRAM存储器容量有限,加上各项系统瓶颈(如总线速度)的限制,这些GDC支持的图像功能、弹性、像素填充率、以及荧幕尺寸都比较有限。
当注重效能,而成本因素不那么重要时,这类应用可采用多芯片架构的高档GDC,依赖外部车用微控制器来管理CAN传输操作、电源以及步进电机控制器等周边元件。此外,由于这些GDC没有内建VRAM与程序闪存,可利用外部VRAM支持高效能操作,未来,运用内建式VRAM可进一步降低高档车用GDC的成本。
用GDC开发全方位立体监视系统
汽车全方位立体监视系统采用了最新的GDC MB86R11/MB86R12。MB86R11/MB86R12中配置了ARM Cortex TM-A9 CPU,在单一芯片中集成了对应OpenGLES2.0的图形引擎和各种外设接口。通过对4路输入影像进行3D图像处理,可绘制出高品质的驾驶场景图,同时有助于开发者实现未来更雄心勃勃和复杂的3D应用。富士通半导体全方位立体监视系统现有的软硬件结构如图3所示。
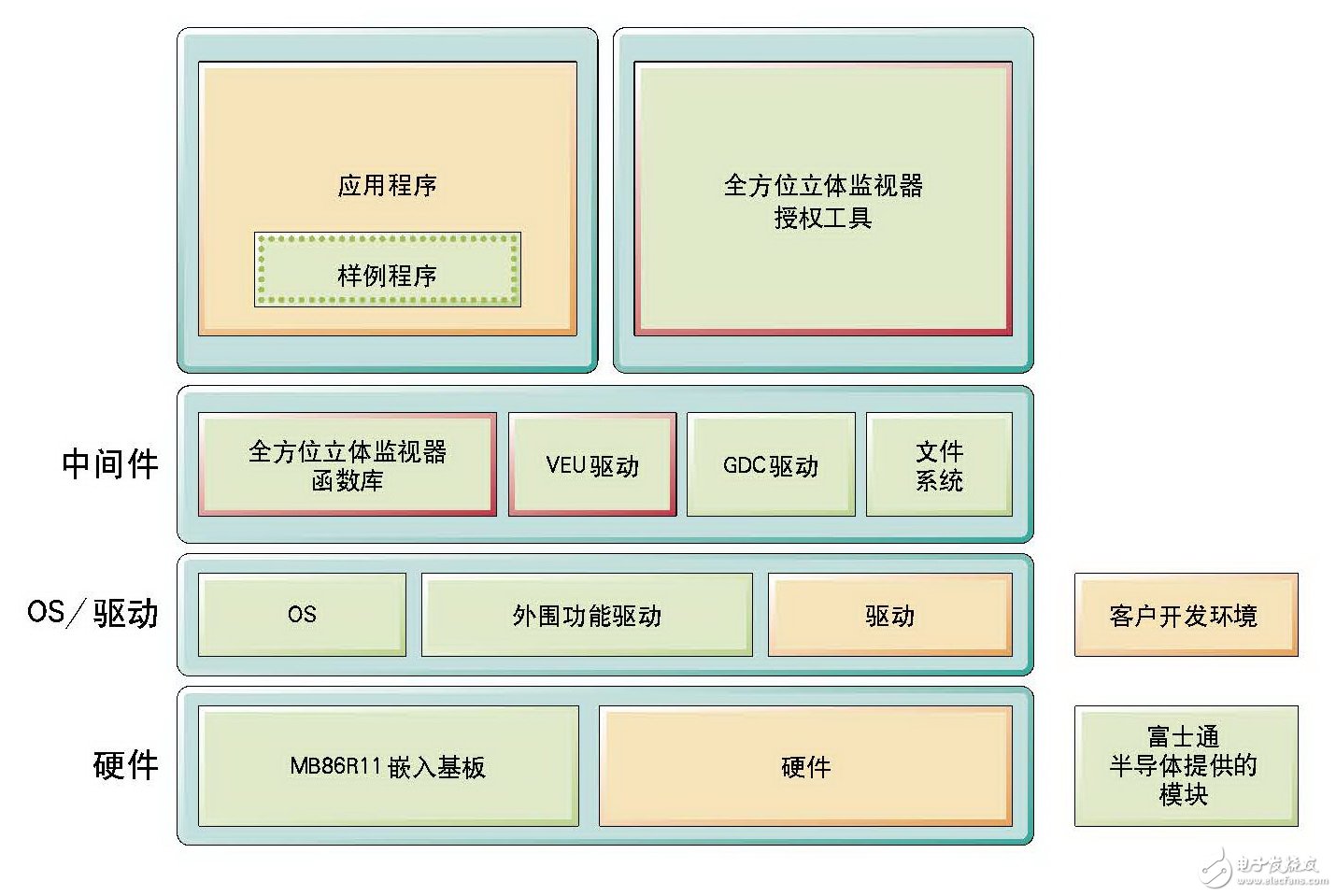
图3:软硬件结构
我们来看看利用上述GDC实现的全方位立体监视系统。该系统是对汽车4个方向上安装的摄影头影像进行3D合成的技术。作为驾驶员的视觉辅助,汽车上配备了4个摄影头影像的合成系统,如图4所示,但是,以往的技术只能做2D图像合成,因而只能进行特定视角的显示;将摄影投影像投影到2D平面上,只能表现从上方观看的俯视图,有时难以分辨周围的车辆和行人。而全方位立体监视技术能将来自4个摄影头的影像合成到3D模型上,从而可从任意视角显示全方位场景;它可将影像投影在立体曲面上,任意变换观看角度,完整表现出希望看到的场景,从而提高了可辨识性。
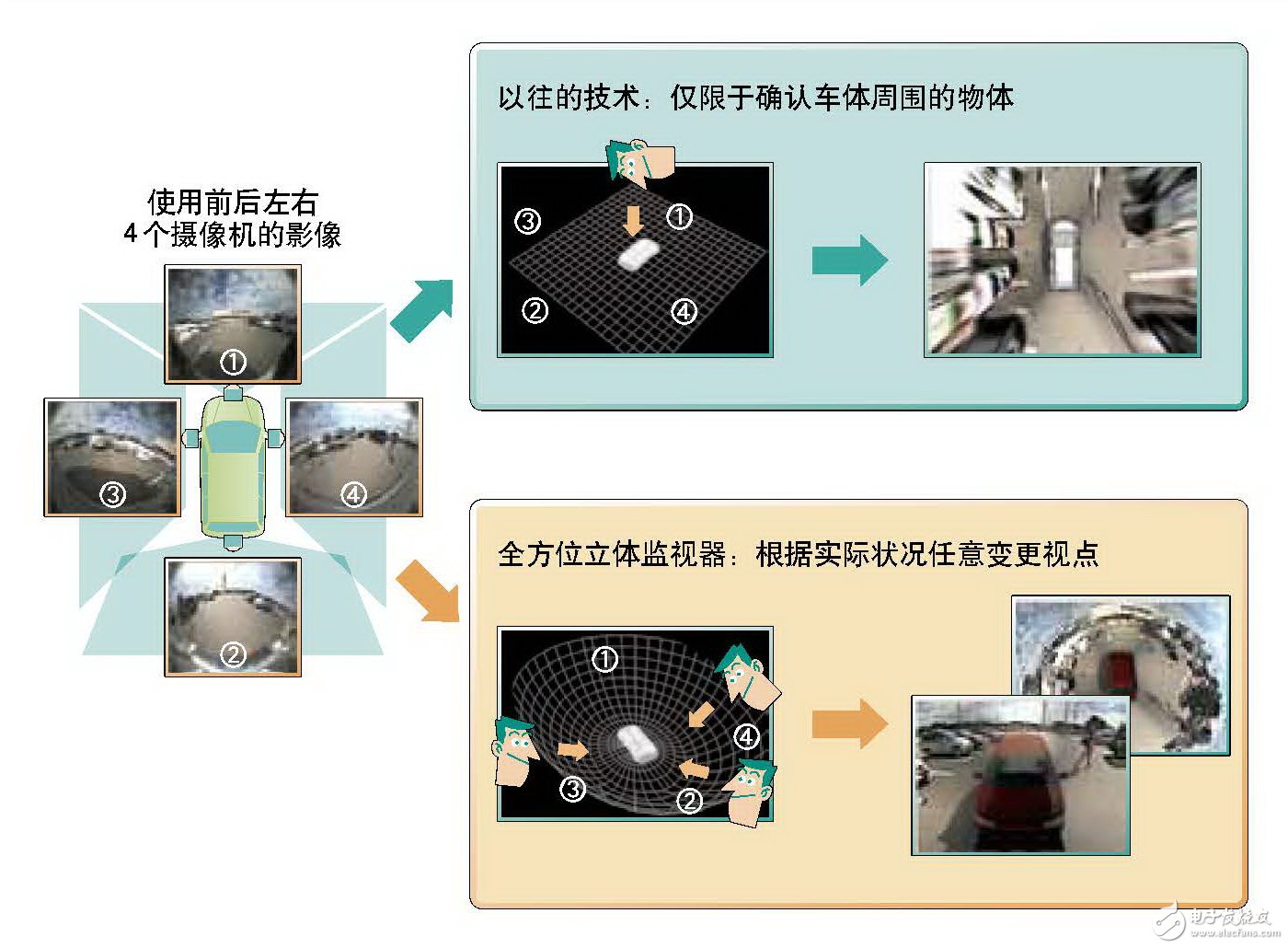
图4:四个摄像头的影像技术
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!
在实际驾驶场景,全方位立体监视系统利用汽车4个方向上安装的高分辨率广角镜头提供更广的视角,从而支持各种驾驶场景。停车时可帮助驾驶员消除视线死角,驾驶过程中可通过更广角度的影像向驾驶员提供障碍物信息。
利用车体上安装的高分辨率摄像头、180度广角镜头,可支持分辨率高达1280×800的影像。这种高分辨率数码摄像头能够提供比以往模拟摄像头更高画质的影像,用于全方位立体监视系统。高分辨率数码摄像头与模拟摄像头的影像比较,清晰度有很大的提高。
全方位立体监视系统在影像立体投影的基础上,对来自摄影头的影像通过VEU(Visibility Enhancement Unit,能见度增强系统)进行图像补正。VEU具有放大缩小、提高分辨率、突出轮廓以及色彩处理功能,通过这些功能对摄影机影像进行补正。通过这些功能可减少放大后影像上明显的锯齿,提高逆光所致阴影部分的可视性,在各种条件下提高画质拓展驾驶员的视野。
富士通半导体为客户提供全方位立体监视器的应用开发环境,包括支持全方位立体影像合成的授权工具、实现全方位立体影像显示和控制的中间件。与客户共同开发的全方位立体监视系统软件由客户开发的应用程序和富士通半导体提供的授权工具组成。
然而,在很多情况下,现有的应用并未充分使用Jade的3D功能。这就太可惜了,因为3D技术可以在现有的平台上实现更加复杂的图像功能,只需更改软件即可。换句话说,汽车厂商可为现有的设计注入新鲜血液,而这并不需要花费额外的硬件工程费用,因为拥有这一功能的硬件和显示已经存在。
在富士通提供的图像库中已包括Jade助手库(Quantum),他终于完成建立几何和纹理绘制所需的绝大多数艰巨工作。而Emerald则使用类似于OpenGL ES 2.0的图库。
Jade和Emerald在其核心部位为3D运行提供了巨大支持。这些图像显示控制器的图像功能中,至少有一半与3D技术相关,包括:
·3D基本要素—— 点、线、线带、三角、三角带、三角扇、任意多边形;
·防失真;
·高氏阴影处理、单色阴影处理;
·纹理绘图——过滤、透视校正、混合模式、alpha颜色混合及遮盖技术;
·几何处理——MVP变换、裁剪、筛选、视见区转换;
·Z-缓冲——消除隐藏面;
·多边绘图标志缓冲器;
·OpenGL ES 2.0——可兼容阴影处理器引擎(只限Emerald)。
这些强大的功能支持可以让3D引擎像处理3D图像那样,非常容易地处理2D图像。当将上述3D引擎的功能添加到2D图像中,就可以获得不同凡响的效果。
图5为3D动画树叶的自动化仪表盘照片。

图5:3D动画树叶的自动化仪表盘
全新的3D技术就是为了解决2D图像处理的各种不足,比如要求小得多的内存空间;支持加速的旋转、缩放和转换;简化图像资产的增加或更改,以及支持简单的迁移路径等,进而改进和实现消费者所需求的用户界面。3D技术可向用户呈现更多信息,但对系统存储器(DDR)和非易失性存储器(NOR/NAND闪存)需求产生的影响甚微。
未来,如果这样一套监视系统能够普及应用,交通事故发生的几率将会大大降低。而目前来看这套系统的广泛推广还是依然需要时日。不过这个市场的前景十分广阔。这样一套能够让社会更加和谐的监视系统值得我们期待!相信它在汽车领域的普遍应用之时,也是汽车驾驶发生巨大变革的之日。随着技术的发展,有一天我们开车就像玩游戏一样轻松安全!
本文选自电子发烧友网7月《汽车电子特刊》Change The World栏目,转载请注明出处!









 工商网监
工商网监
用户评论(0)