完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
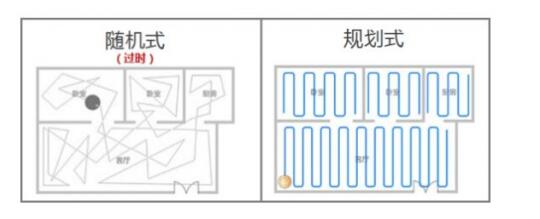
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。...
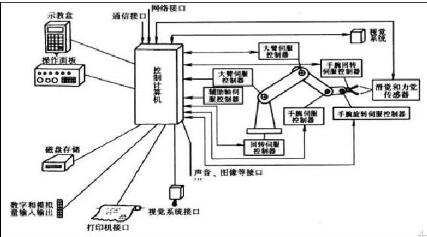
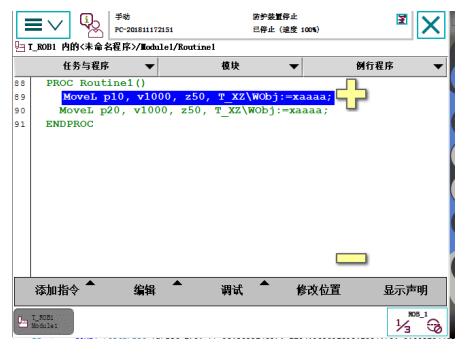
如果需要将ABB工业机器人移动到某个已知的位置点时,操作步骤一般是建立一个程序,然后在程序里面编写一条运动语句。...
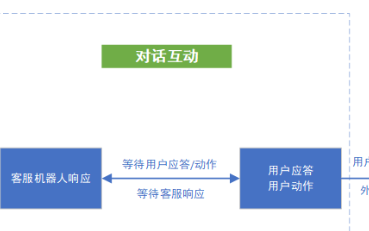
未来最大的交互,不是现在的人机交互,而是人与人工智能的交互。人工智能行业现今取得了不少的成就,也逐渐进入了千万家庭,陪伴在了很多人的身边,其中就包括智能语音机器人。本文笔者将以智能客服领域为出发点,结合自己的工作实践进行详细分析。...
随着经济全球化的不断发展,人们对万物互联的需求也越来越迫切。作为万物互联的重要支撑,5G技术无疑是当前最热的话题之一。随着5G时代的到来,机器人领域也将发生翻天覆地的改变。...
我们不仅能让用户直观地体验控制机器手臂,而且还为用户提供了任务自动化所需的全部工具,所有这些都是通过一个简单的界面完成的。...
码垛是机器人最常用的功能之一,与其他多数机器人不同,ABB没有码垛包,但实现起来也很简单,也甚至可以实现复杂码垛情况。...
之所以采用3D打印来制作机械手套的软胶驱动器,是因为传统的开模制作所需的步骤多、时间长。3D打印则可以减少制作软胶驱动器的步骤,大大缩短制作周期。...
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现...
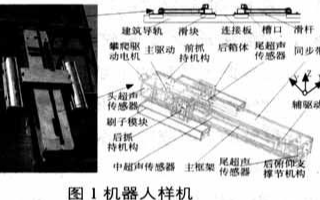
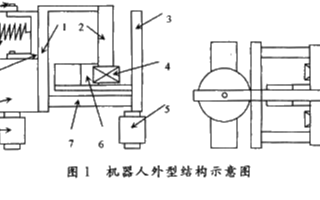
本文所研究的是一种新型弹性单腿机器人,该机器人采用双臂驱动,弹性伸缩腿中不安装驱动部件,系统依靠内部动力学耦合实现动态站立平衡、起跳和稳定连续跳跃。其机械本体如图1所示。...

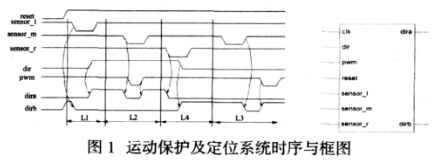
就巡线机器人的运动控制系统中的保护及定位系统而言,其本质是根据传感器信号给出相应的电机控制信号。也就是说,电机保护及定位系统完成控制输入(传感器信号)到控制输出(电机控制信号)间的映射。电机保护及定位系统的特点决定了其非常适合于采用有限状态机进行设计。...
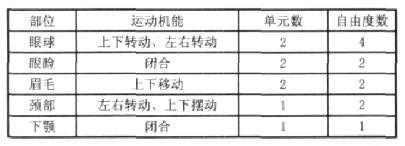
十多年前“诡异谷”的理论制约了类人机器人的发展,但随着科技的发展,人们再次把关注的眼光投向了“更像人类的机器人”身上,机器人博览会上的saya已经到了以假乱真的地步,制作外形和行为方式更接近于人类的机器人已经成为了新的焦点和热点。在国外的一些科学家已经取得了一定的成绩,但在国内,对于表情机器人的研究...
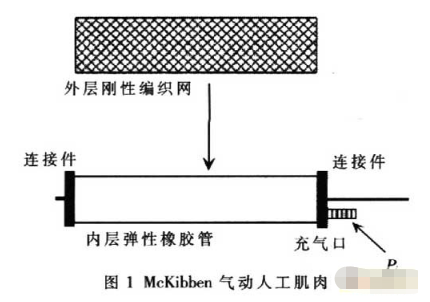
由于气动人工肌肉只能提供单向驱动力,故需由两条肌肉以类似生物颉颃肌的方式构成对抗性回转关节以实现操作臂的力闭合。本文利用McKibben气动人工肌肉作为驱动器搭建了单自由度颉颃关节系统。此系统的硬件部分由气压驱动子系统、传感器子系统和控制子系统组成。系统结构图如图2所示。...
高压输电线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换,原本微小的破损和缺陷就可能扩大,最终导致严重事故。因此,电力公司需要定期对线路设备进行巡检,及时发现早期损伤和缺陷并加以评估,根据评估结果安排必要的维护和修复,从而确保供...
剧院主体外形呈半椭球形,外墙由玻璃和钛合金板覆盖,总表面面积达到36000m2。大剧院上钛板分为7种规格,宽度从2.2m到1.5m不等。沿球面纬线方向各层钛板之间均分布有封闭铝导轨,宽25mm,高出板面40mm,且玻璃和钛板上导轨连续。钛板间存在横纵缝隙,缝中装有装饰用的半球形结构。...
本文介绍的磁驱动微小爬壁机器人,采用电磁吸附技术,尺蠖运动原理,具有结构简单、重量轻、加工制作容易、控制灵活、控制电路简单、转弯速度快等特点。...
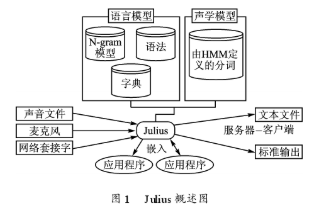
语音识别系统是一种模式识别系统,系统首先对语音信号进行分析,得到语音的特征参数,然后对这些参数进行处理,形成标准的模板。这个过程称为训练或学习。当有测试语音进入系统时,系统将对这些语音信号进行处理,然后进行参考模板的匹配,得出结果。此时便完成了语音识别的过程。...
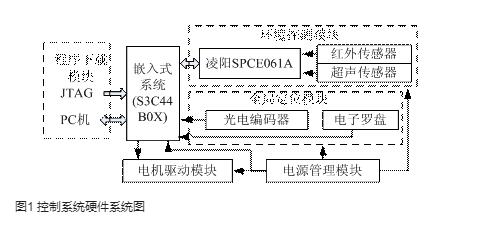
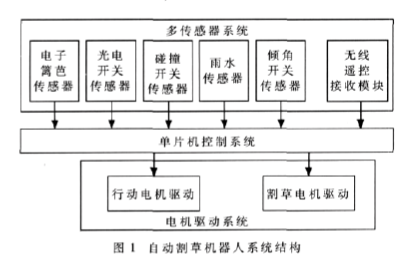
自动割草机器人主控系统的结构框图如图1所示。系统主要由单片机控制系统、传感器系统、电机驱动系统3大部分组成。其中单片机控制系统的处理器采用国产芯片STC12C5410AD,包含10 bit的ADC以及串口、I2C等通用串行接口,高达40 MHz的主频完全可以胜任本系统的计算和处理速度。...
在国家863计划支持下,国防科技大学机器人实验室于2003年研制出一台新型仿人机器人;同时与合肥智能机械研究所合作,在该机器人脚掌上安装了可检测地面反力信息的集成五维力/力矩传感器。本文通过对仿人机器人运动控制系统结构和传感器电路结构的分析,提出了一种基于CAN总线的力信息检测系统;通过实验表明,该...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




