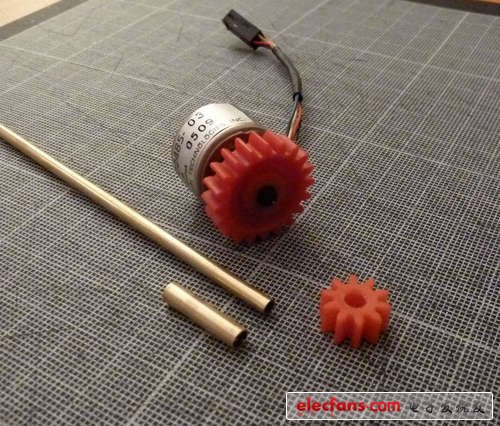
● 和滑轮一样,啮合齿轮也是从Rapid网站订购的。

● 固定在电机转轴上的黄铜管由K&S Metals公司生产,是我从附近的器材商店淘到的。
● 我又多加了两个用塑料薄片裁剪成的引线装置,它们可以使绕线和齿轮保持对齐。

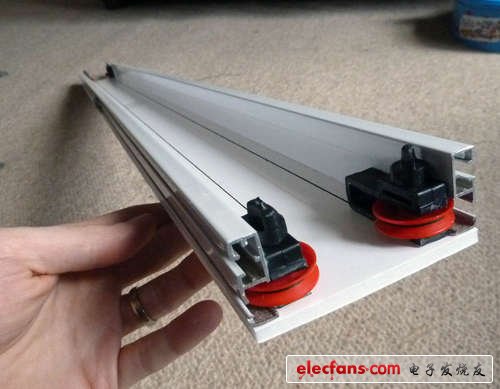
● 看似一切都很美妙,也的确能工作,但它们也有很大的局限性,那就是对工作条件太敏感了。因为是这套系统是靠摩擦力驱动,所以发生打滑的概率很大。即便刚开始运行很好也不能保证永远不出类似问题。我绞尽脑汁也对它无可奈何,我想所有靠摩擦力驱动的装置都会遇到这样的问题吧。
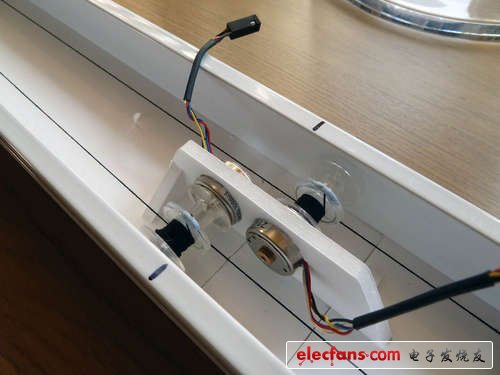
● 所以,最终只好又重新选择了双绕线轮,但是我还是做了一些改进,适当改变其放置位置使绕线更均匀。提前尽量将绕线轮上的线绕均匀,这样绕线的轮和不绕线的轮才有相同的转动速度。
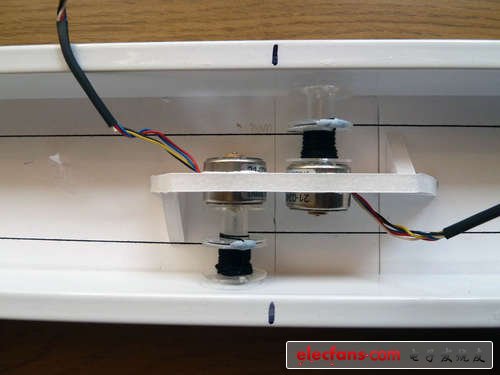
● 它虽然不像珠链传动系统那样简单,但是却很安静,更重要的是,它们重量轻,价格低,和这些小电机搭配很完美。
● 通过以上的过程,童鞋们也能感觉到,设计其实就是一个不断改进,不断折中的过程,经过这样的过程才能形成最终的实际作品。不经过辛苦的摸索,直接想把纸上设想的方案完美转化为现实是不太实际的做法。

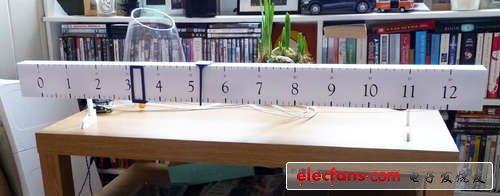
● 我又在时钟背后的槽里安上了几个支脚,这样它就能站起来了,如果往这些槽里穿上绳子还可以把它挂在墙上。
● 我觉得我更想给它做个壳子。
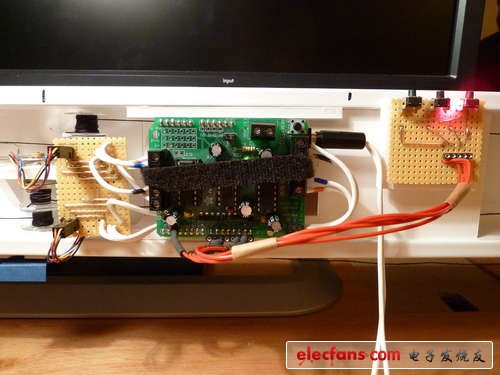
最后一步是安装电路板。可以先把它们粘在一块小泡沫板上,再将小泡沫板固定到时钟背后。为了方便固定,可以在时钟背后适当的挖一些槽。
需要用到下面这些材料:
● 几英寸长的万能电路板
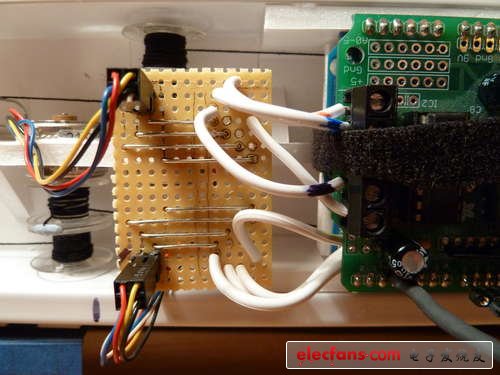
● 连接用的导线
● 与Motorshield引脚相匹配的导线插头
● 3个按钮开关和1个LED灯(我用的是弯脚型开关和散光LED,这样更便于操作。)
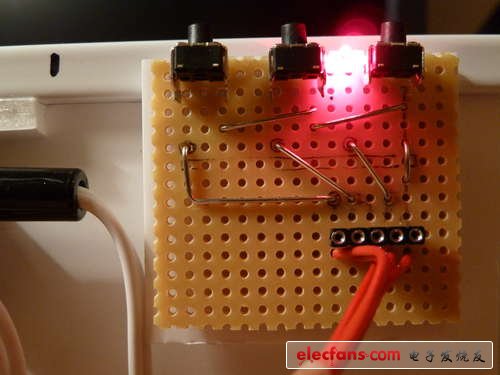
● 程序也进行了修改,现在时钟可以在按钮的控制下开启或关闭,当它停止时,表盘时间可以由另外两个按钮手动调整。
● 实现此功能靠的是Alexander Brevig按钮函数库。有了这些调节按钮,设置时间时就不用再连接电脑,时钟也就更实用了。但是如果万一时钟掉电,还是需要进行复位。
● 对时钟的外观进行修整,使它看上去更像是一件产品。
● 3个开关分别连接2脚,9脚和10脚,LED灯连接在13脚。每个开关的另一脚都和地线相连,并且每个引脚都有上拉电阻(内置于Arduino板上),所以只要不短路,各引脚默认电压就是+5V。