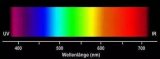
光源从大类上可分为普通自然光和人造光源,由光照强度、色温及光源的几何形状来描述。在不锈钢表面缺陷检测....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 15:51
•4393次阅读
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 15:45
•3938次阅读
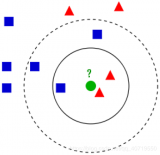
举例说明: 如果K=3,绿色圆点的最近的3个邻居是2个红色小三角形和1个蓝色小正方形,少数从属于多数....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:33
•985次阅读
在这篇OpenCV Python文章中,我想展示OpenCV中的基本颜色检测示例。 我们用颜色空间或....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:30
•1112次阅读
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:30
•11049次阅读

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 10:01
•3070次阅读

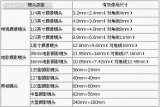
光学镜头一般称为摄像镜头或摄影镜头,简称镜头,其功能就是光学成像。镜头是机器视觉系统中的重要组件,对....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 09:59
•934次阅读
线阵相机顾名思义就是取像是成线性的。它的传感器是成线型的。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 07-03 09:58
•1002次阅读
相机是机器视觉解决方案系统的核心部件,广泛应用于各个领域,尤其是用于生产监控、测量任务和质量控制等。....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-30 15:23
•1440次阅读
多光谱成像技术自从面世以来,便被应用于空间遥感领域。而随着搭载平台的小型化和野外应用的需求,光谱成像....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-29 17:03
•2558次阅读
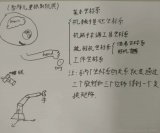
【导读】很多小伙伴都对机器人非常感兴趣,但是不知道一个机器人系统有哪些部分组成,到底是怎么实....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-28 17:00
•1037次阅读

根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-28 16:59
•1191次阅读
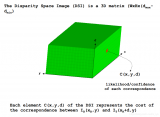
机器视觉基本组成 根据美国自动成像协会(AIA)的定义,机器视觉(Machine Vision)是一....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 15:35
•1202次阅读
使用C#的语法方式逐句改写Halcon代码
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 14:51
•3505次阅读
进入OpenCV官网,release发行版中选择需要下载的OpenCV版本,下载Windows版本,....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-27 14:40
•3955次阅读

1. 点结构光的缺点 点结构光只能获取单个点的深度信息,如要获取整个被测对象表面结构信息,需要沿着水....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 11:33
•579次阅读
论文链接:https://arxiv.org/ftp/arxiv/papers/1910/19....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:51
•644次阅读

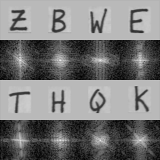
在本教程中,您将学习如何使用OpenCV和快速傅里叶变换(FFT)在图像和实时视流中执行模糊检测....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:47
•1022次阅读
目前市场上共有两种类型的采集方法可用于采集物体的图像:面阵扫描和线扫描。最常见的2D机器视觉系统使用....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:29
•3142次阅读

基于点云的3D障碍物检测 主要有以下步骤: 点云数据的处理 基于点云的障碍物分割 障碍物边框构建 点....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:22
•986次阅读

利用opencv+openpose实现人体姿态检测,附详细代码。 通过一个偶然机会,我了解到了人体姿....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-26 10:15
•3037次阅读

今天介绍一下深度图像的获取方法主要有哪些,以及这些方法会导致深度图像中存在什么样的问题。 在计算....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 16:26
•1215次阅读

机器视觉在工业上应用领域广阔,核心功能包括:测量、检测、识别、定位等。产业链可以分为上游部件级市场、....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 15:12
•941次阅读
随着机载激光雷达技术的日益发展,其在测绘行业的应用越来越成熟,尤其在大比例地形图的应用中,具有无可替....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 11:30
•2650次阅读
看到一个自己喜欢的小玩意儿,把它放到一个黑乎乎的盒子里,过那么一会儿,你就能得到它的obj网格模型文....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-25 11:23
•965次阅读

人工智能会监控来自传感器的数据,以快速评估最终产品是否正确制造,智能传感器所能提供的精确度水平,预计....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-20 15:20
•3690次阅读
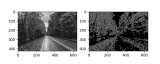
本期我们一起看看如何进行图像边缘的检测。边缘检测通常用于理解图像中的对象,帮助机器做出更好的预测....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-20 15:14
•1266次阅读
最近经常有同学反馈 GPU 利用率低,严重浪费 GPU 资源的问题,经过对一些实例分析后,借着这篇文....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-19 14:07
•1182次阅读

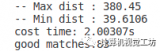
我们都知道特征检测和匹配是计算机视觉领域中的重要任务,它们在许多应用中发挥着关键作用,比如SLAM、....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-19 11:27
•5480次阅读
三维计算视觉研究内容包括: 1)三维匹配 :两帧或者多帧点云数据之间的匹配,因为激光扫描光束受物体遮....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 06-19 11:06
•674次阅读



 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

