PointXYZ 成员:float x,y,z;表示了xyz3D信息,可以通过points[i].d....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-31 09:26
•2495次阅读
一般3D相机都会集成在一个框架内,不会像2D视觉系统那样区分开来。这里我放一张基恩士最新型的一款3D....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-31 09:21
•30908次阅读
个人或办公电脑一般安装的是Windows操作系统,拥有成熟的软件生态,影音娱乐一应俱全。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-31 09:15
•8138次阅读
本方案将搭建一个基于机器视觉的流水线检测手机条码平台,把产品放置于流水线上,高速工业相机对其逐一采集....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-31 09:04
•3461次阅读
摄像机内参反映的是摄像机坐标系到图像坐标系之间的投影关系。摄像机内参的标定使用张正友标定法,简单易操....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:26
•3843次阅读
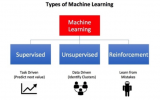
通俗一点讲,机器人不是人,它的视觉和决策能力,都需要研制者通过一些方法赋予给它。通过深度学习获得的能....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:23
•2703次阅读
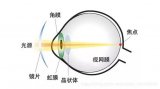
镜头相当于充当晶状体这一环节,简而言之,镜头主要的作用就是聚光。为什么要聚光?比如说在大晴天用放大镜....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:20
•5471次阅读
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:18
•14488次阅读
而 F = A−TEA−1,其中 A 是摄像头内参数矩阵;对矩阵 E 和矩阵 F 来说,均满足外极约....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:15
•6393次阅读

相机的选择十分重要,直接关系到整体设备的成本,像素多就要采用大的镜头,数据量大就要采用传输率大的数据....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:10
•4287次阅读
一般在工业上会采用硬件改进的方法。当需要提高视觉识别的精度或者范围时,会采用多个相机图像进行拼接的办....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:07
•3210次阅读
直接法不必进行特征提取与匹配,因而具备了更高的计算效率,但它易受相机曝光、环境光源等因素影响,当场景....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 15:03
•2797次阅读
主要应用于工业、医疗、科研与安全领域的图象处理。典型应用领域是检测连续的材料,例如金属、塑料、纸和纤....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:57
•19867次阅读
在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:53
•17905次阅读

传感器中激光发射器通过镜头将可见激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:51
•19398次阅读
LED光源:在电池片停留位置的四周放置四个光源对电池片进行打光,增强电池片亮度,让相机更好的提取电池....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:46
•21655次阅读

这可再熟悉不过了,DDD是深度,BBB是基线,fff是焦距(像素单位),ddd是视差。咱们一分为二看....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:43
•3091次阅读
TDI-CCD的工作原理与普通线阵CCD的工作原理有所不同,它要求行扫速率与目标的运动速率严格同步....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:40
•19627次阅读
目前AGV的工作环境可分为室内环境和室外环境,更多的系统是工作于室内或以室内为主要工作场所。因为室内....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:37
•13532次阅读

为了明确什么哪个才是最重要的,最好做一张评估表,列出“必须做”和“可以做”的测试。一旦主要的对测试标....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:34
•2759次阅读
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。如果这块玻璃上面没有瑕疵,那么,我们是....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:29
•5426次阅读
从狭义上讲,三维视觉测量技术即通过计算机分析处理,让计算机不仅具有和人眼一样的视觉感受,而且能够获得....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:23
•6423次阅读
不过,深度神经网络系统往往需要大量的训练数据,以及已知答案的带标签样本,才能正常地工作。并且,它们目....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:21
•6584次阅读
机器视觉系统包含一些重要部件,光源,镜头,相机,图像采集卡,数据传输,图像处理和测量软件等。随着各个....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:05
•2922次阅读

腐蚀和膨胀是针对白色部分(高亮部分)而言的。膨胀就是对图像高亮部分进行“领域扩张”,效果图拥有比原图....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:02
•3811次阅读
回顾日本的工业机器人发展历程,可以看到推广工业机器人是日本在产业升级、人口老龄化等多重压力下的必然选....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 14:00
•5736次阅读

怎么评价这种思路呢?其实还是不错的,除了分类任务,在点云目标检测中,也有不少论文采用了这种思路,比如....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 13:54
•3644次阅读
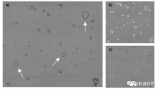
这个问题是目标检测,并且需求十分明确:提取出白色圆环中的区域的图像。观察图像可以发现图中白色的部分几....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 13:50
•2720次阅读
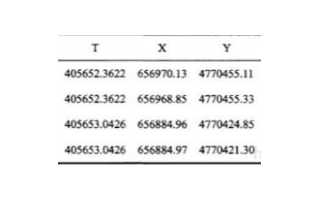
测量原理:利用CCD摄像机可以获得三维物体的二维图像,即可以实现实际空间坐标系与摄像机平面坐标系之间....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 13:47
•4166次阅读

人眼所能能识别的光谱区间为可见光区间,波长从400nm到700nm;普通数码相机的光谱响应区间与人眼....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 08-28 13:44
•5469次阅读





 工商网监
工商网监