完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
QE For Motor是专门为电机方案开发而设计的工具,支持从电机控制软件的执行到验证的整个开发过程。QE For Motor链接电机方案信息网站、电机控制软件、集成开发环境e2 studio和调试工具Renesas Motor Workbench,通过工具之间更密切的协调来提高可用性,并为不熟悉...

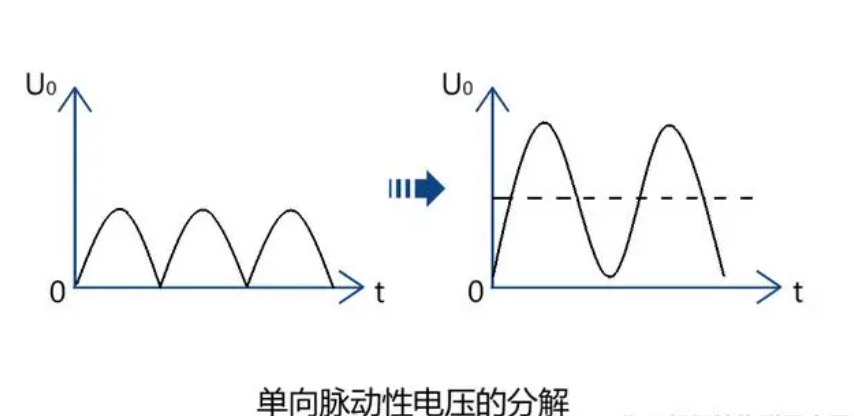
整流器电路的电压输出是单向脉冲电压,不能直接用于电子电路。因此,有必要对输出电压进行滤波,消除电压中的交流分量,并将其转换为直流电,用于电子电路。滤波器电路主要使用具有交流特殊阻抗特性的器件,如电容器和电感器。本文分析了不同形式的滤波电路。 滤波电路主要有下列几种:电容滤波电路,这是最基本的滤...
写在前面 在上一篇文章(隆重介绍MCX N家族又一颗新星)中,小编带大家认识了这个MCX N系列的新成员,本篇文章将会为大家介绍MCX N23的官方评估板FRDM-MCXN236。 提到FRDM板子,想必大家早已有所耳闻,NXP为以前的Kinetis系列以及最新的MCX系列都推出了FRDM板子,比如...

串行外设接口(SPI)是一种广泛使用的同步串行通信接口,在嵌入式系统中扮演着重要角色。本文将深入探讨如何在NXP MCXA153 MCU上实现和优化RT-Thread的SPI驱动,同时介绍NXP提供的相关开发工具和技术。 SPI简介 SPI由摩托罗拉公司开发,是一种全双工同步串行总线,主要由四个信...

EtherCAT总线ZMIO310扩展模块的接线与使用...
晶振作为时钟电路中必不可少的信号传递者,单片机要想正常运作就需要晶振存在。因此,在电子电路设计中也少不了晶振的参与。一个好的晶振电路设计,是能够为电子提供最好的空间利用率,同时发挥最大的功能性作用。...

前言: 随着国内市场对芯片的需求日益增加,国产中高端芯片在不断的占领国内市场甚至在国际市场都有一部分,越来越多的企业开始研究自己的芯片,这个芯片的种类繁多,功能性强大,也有一些芯片占有着很大的市场份额,有着不可取代的地位。 随着芯片的发展存储芯片的趋势也开始不甘落后,有着越来越多的新型的芯片问世,这...

如何实现数据的高效管理、解读和正确分析,以避免数据泛滥的不利影响?掌握好“指标与算法”和“全面可视化分析工具”两大关键要素,助力AD/ADAS系统开发、验证和改进过程!...

开箱测试RT-Thread官方已完成了对英飞凌XMC7200EVK的移植,通过shell可以看到做好了uart3的console。本文将介绍如何进行RT-ThreadCan移植。接下来我们要完成CAN_FD的驱动移植,并正常启动RT-Thread,首先参考下面的帖子搭建好开发环...

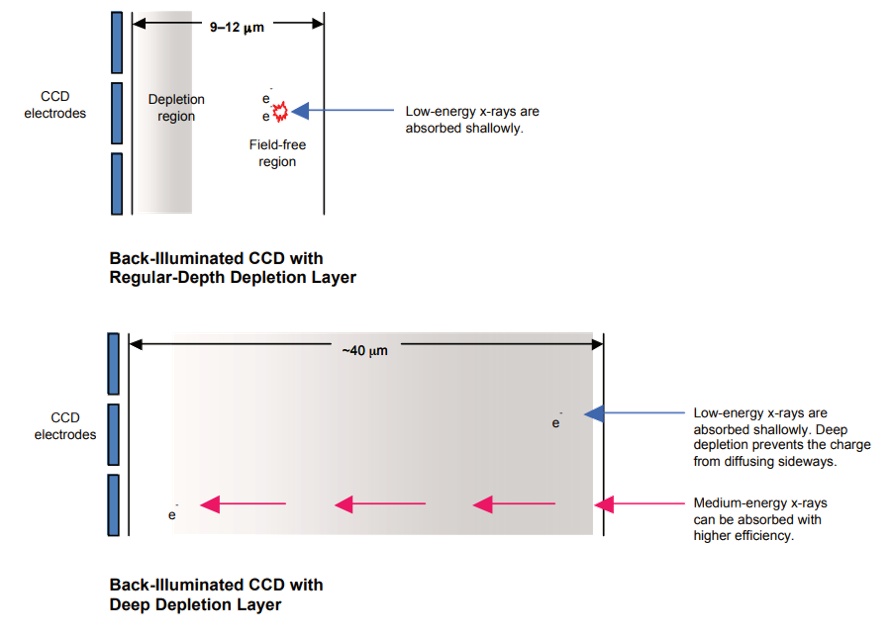
图 1:背照式 CCD。顶部:具有常规深度耗尽层的 CCD。底部:具有深耗尽层的 CCD。 不同科学 CCD 类型的定量比较 概述 自1969年电荷耦合器件 (CCD) 技术发明以来,其从NIR 到电磁波谱 X 射线区域的扩展灵敏度已在各种应用领域(例如天文学、玻色-爱因斯坦凝聚、荧光成像、光度测定...
成果速递 射频异质异构集成全国重点实验室(上海交通大学)毛军发院士团队顾昌展副教授课题组的两项研究工作“A Robust and Accurate FMCW MIMO Radar Vital Sign Monitoring Framework With 4-D Cardiac Beamformer ...
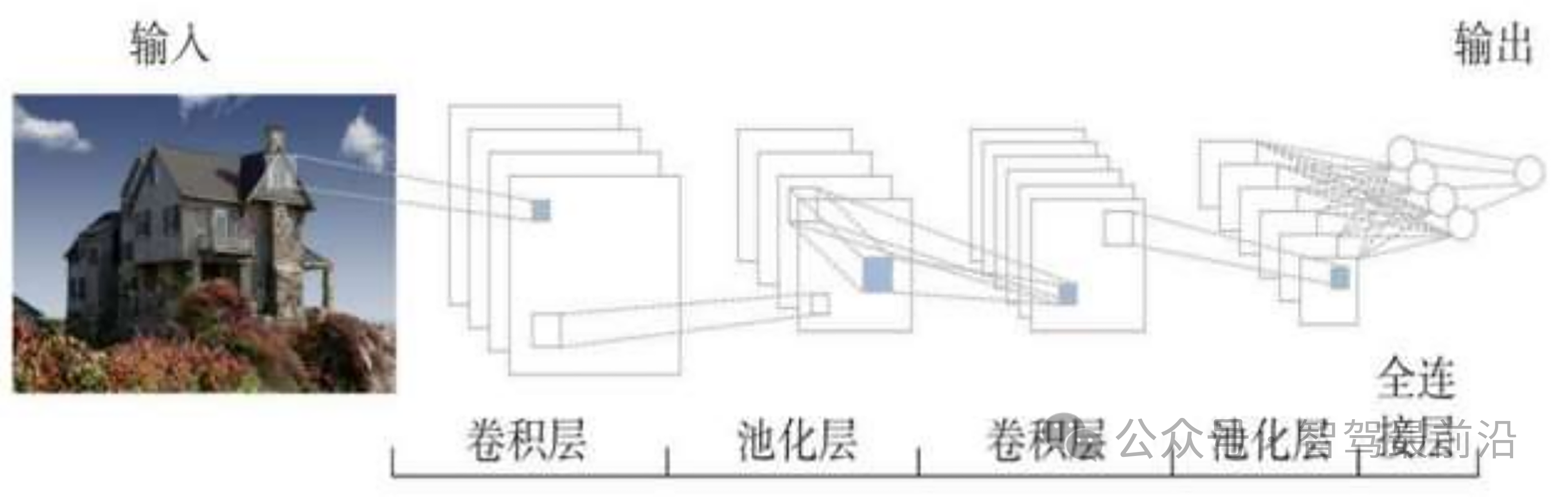
编者语:「智驾最前沿」微信公众号后台回复:C-0587,获取本文参考报告:《从特斯拉视角,看智能驾驶研究框架》pdf下载方式。 随着自动驾驶技术的快速发展,智能驾驶已成为汽车行业技术竞争的焦点。特斯拉作为该领域的先行者,通过对算法、硬件、数据闭环和市场战略的深度布局,为自动驾驶行业的发展提供了重要借...
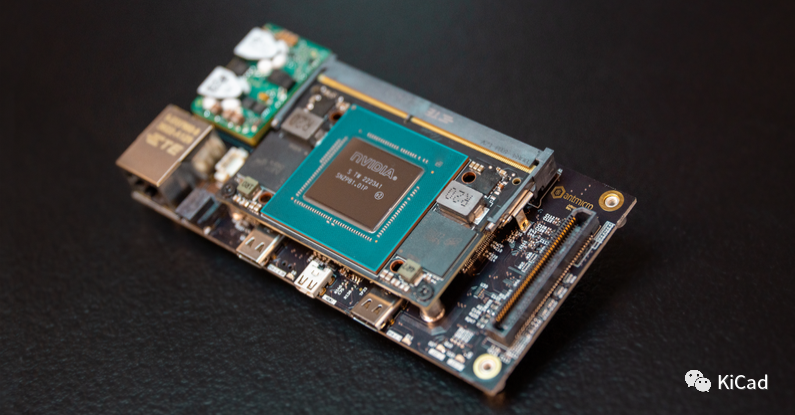
“ 该项目包含支持NVIDIA Jetson Orin Nano和Jetson Orin NX系统模块 (SoMs)的基板并开源了所有硬件设计文件。该基板对SoM的IO接口进行了 分解。此外,它还暴露了一个扩展接口,允许它与使用PCIe或低速接口的 外 部处理模块集成。 设计文件是在KiCad ...
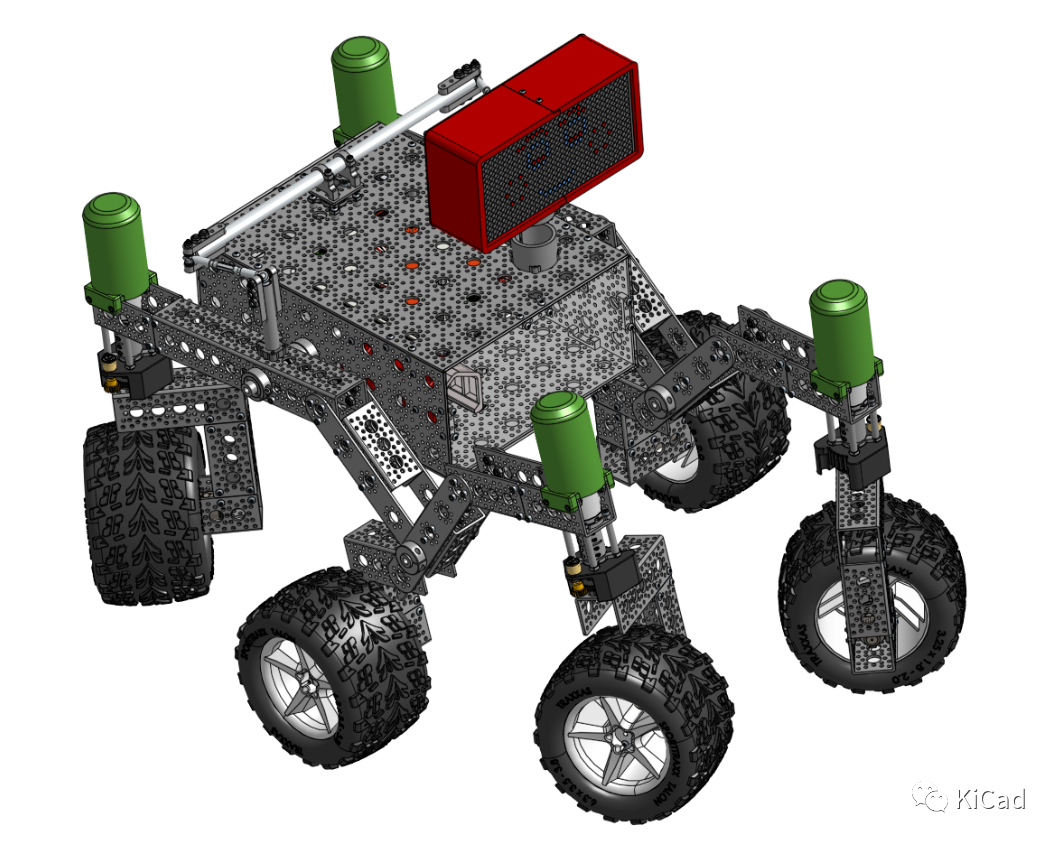
“ JPL 开源漫游车是 JPL 用于探索火星表面的六轮漫游车设计的缩减版,是一种开源、自己动手制造的漫游车。 ” 概览 JPL 开源漫游车是 JPL 用于探索火星表面的六轮漫游车设计的缩减版,是一个开源、自己动手制造的漫游车。开源漫游车的设计几乎完全采用现成的消费者部件(COTS)。该项目旨...
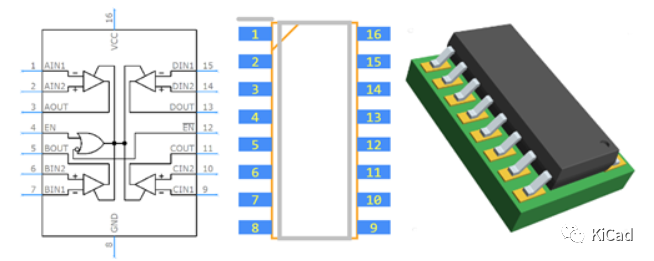
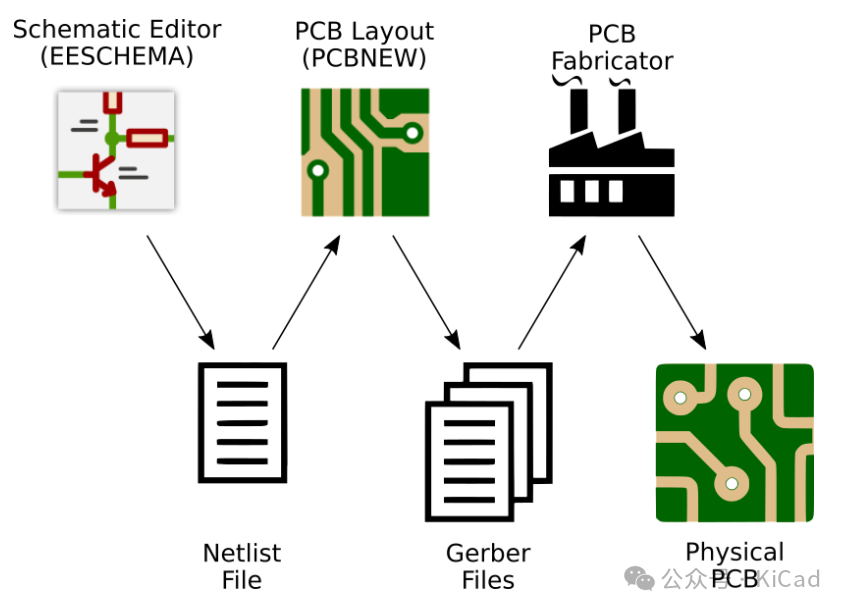
“ 原理图符号及PCB封装是电子设计中最基本的要素。本文针对刚踏入电子设计的新人,介绍了原理图符号与PCB封装区别,以及在KiCad中两者的对应关系。 ” 什么是原理图符号? 原理图符号抽象了元器件的功能,并将其接口信息(引脚定义)传达给 KiCad 和阅读原理图的人。因此,需要使用“引脚”来定义...
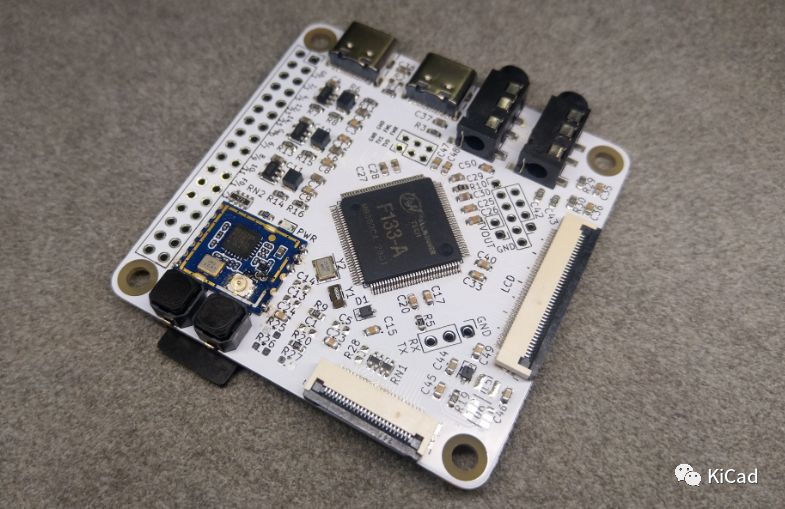
“ 全志F133是首款基于RISC-V架构的F系列处理器,F133是一款64bit处理器,性能比以往的F系列芯片有很大的提升。 ” 概览 全志D1s,又名 F133,它是早些时候和支持 Linux 的开发板一起推出的全志D1 RISC-V 处理器的低成本版,它和D1的主要区别在于D1s内置的...
“ Sweep 项目包含一系列自制的无线键盘,基于 Pro-Micro 或 Nice!Nano, ” 概览 Sweep 是Ferris 项目( https://github.com/pierrechevalier83/ferris )的一个特殊版本,它使用子板(如 promicro、elite...

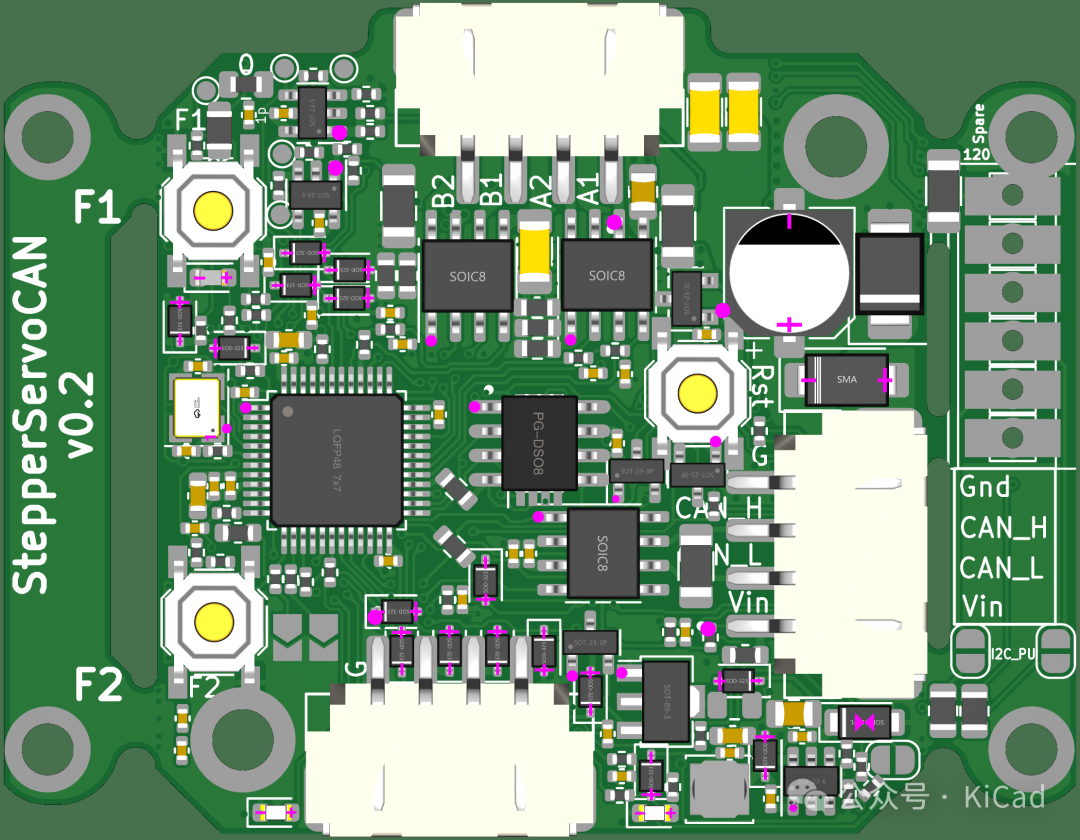
“ 这是一个 CAN 总线的步进电机控制板。 ” Made with KiCad 系列将支持新的展示方式。直接将以下链接复制到浏览器中: https://www.eda.cn/ecadViewer/viewerPage/?xmlId=7a16c2c0-7b76-4813-8ad8-b613a882...
“ 持续更新 8 年,Github 超过 1k star 的项目。一种使用文本替代原理图的语言。 ” 追踪 skidl 项目很久了,之所以之前没有分享是因为老版本只能支持 KiCad 5.0 符号库的解析,而且生成的网表也仅能支持 KiCad 6,所以用起来比较麻烦。最近作者又更新了一个大版本...
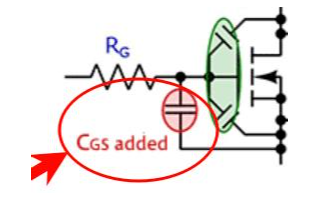
Part 01 前言 在MOSFET中,dv/dt指的是MOSFET在开关瞬态期间,其漏源电压Vds的变化率,即漏极和源极之间电压随时间的变化速度。一般想到dv/dt,我们第一反应是高dv/dt会导致强烈的电磁干扰,影响周围的敏感电路,降低系统的信号完整性。除此之外高dv/dt还会产生另外一大危害,...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




