完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
这个有趣但复杂的项目将涵盖从设计构建机器人到 linux (raspberry pi) 中的高级配置,再到构建 Android 应用程序和控制机器人。...
BASE坐标系: 可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。...
虽然它是高速运动的软体机器人,但仅有毫米等级大小。与传统机器人采用塑料、铝和金属制造不同,这种超速机器人是由聚合物和形状记忆合金等柔性材料制成。...
移动机器人运动控制系统的设计主要包括系统的功能和体系结构设计,功能设计主要完成控制功能和算法的软件设计,而体系结构设计是功能在硬件上的实现。根据面向的任务和环境不同,对移动机器人运动控制系统的设计也不同。...
码垛 E:包括码垛 E(单路径模式)和码垛 EX(多路径模式) 适用于复杂的堆叠模式(工件姿势改变,堆叠时的底面形状不是四角形)。...
成长计划 人工智能重新创造机器人 工程师成长计划第十三期,入门智能机器人设计。 从机器狗到仿生机器人,从扫地机器人到无人驾驶出租车。各种各样的清洁机器人,送货机器人已经融入人们的生活,并且创造了巨大的商业价值。 在高性能边缘计算芯片和人工智能的加持下,机器人,正在从实验室走向商业落地。对于工程师而言...
对人形机器人销量的假设:关于人形机器人市场规模,我们认为可以参考特斯拉电动车的 放量节奏。回溯历史,Model-S 在 2012 年推出,2013 年特斯拉电动车销量达到 2.2 万辆, 2014 年达到 3.2 万辆,2015 年实现 5.1 万辆。...
室内定位模拟算法 1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等无线网络定位法。 2、邻近(Proximity), 使用具有有限的感知范围和分析能力的传感器,RFID。 3、场景分析(Scene analysis),利用场景画面中的特征完成定位分析,...
半导体设备行业是典型的高技术壁垒行业,这也是国内较为薄弱的领域。当前全球半导体设备市场主要由国外厂商主导,美国、日本、荷兰等企业处于市场绝对主导地位。...
缺乏互操作性所产生的问题往往是经济问题,而不是安全问题。也就是说,在两个不能互操作的工业移动机器人相互 " 凝视 " 时,可能会导致生产效率的低下。虽然这些显然是重要的问题,但它们也不属于安全标准的范围。...
手眼标定分为两种类型:一种是眼在手上的手眼标定(Eye⁃in⁃Hand);一种是眼在手外的手眼标定(Eye⁃to⁃Hand)[8]。...
磁电式编码器使用磁场感应元器件代替码盘,因此可以在提高精度的同时保证体积相对较小。但是磁电编码器价格比较昂贵,目前仅在精度要求、工况要求相对较高的领域适用,随着未来磁场感应元器件价格的下降,磁电式编码器将会有代替光电式编码器的趋势。...
今天我们将使用AVR 单片机构建一个线跟随机器人。线跟随机器人现在广泛用于制造业、医疗、家庭应用和货物仓库。机器人不仅限于这些应用,还可以在未来的许多应用中扩展其应用。...
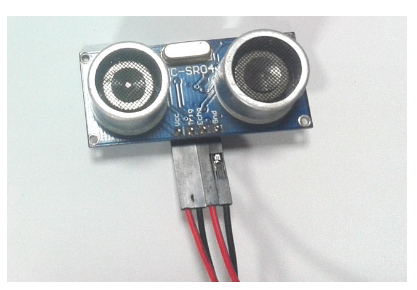
我们将使用超声波传感器和 Arduino 构建一个避障机器人。这里使用超声波传感器通过计算机器人与障碍物之间的距离来感知路径中的障碍物。如果机器人发现任何障碍物,它会改变方向并继续移动。...
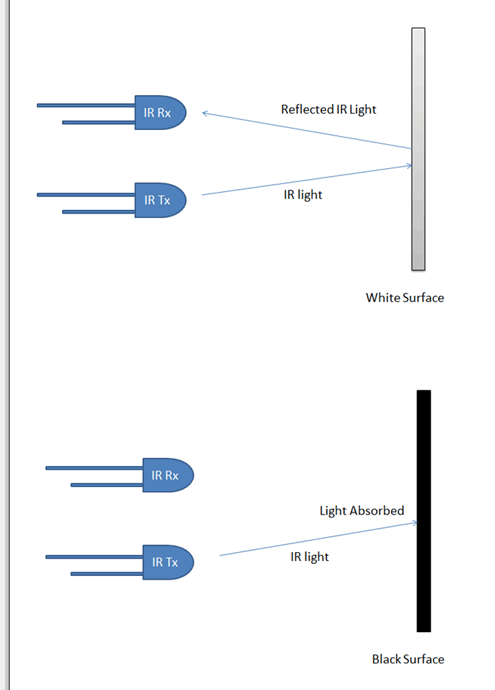
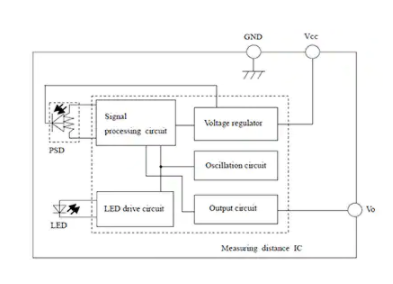
使用红外线或超声波距离测量可以实现更复杂的非接触式墙壁感应。基于红外线的测距传感器,例如Sharp GP2Y0A51SK0F产生与反射到内置探测器上的红外信号强度成比例的模拟电压。该传感器能够测量 2 厘米至 15 厘米的距离,通过使用三角测量方法计算距离,最大限度地减少检测表面的反射率对测量精度的...
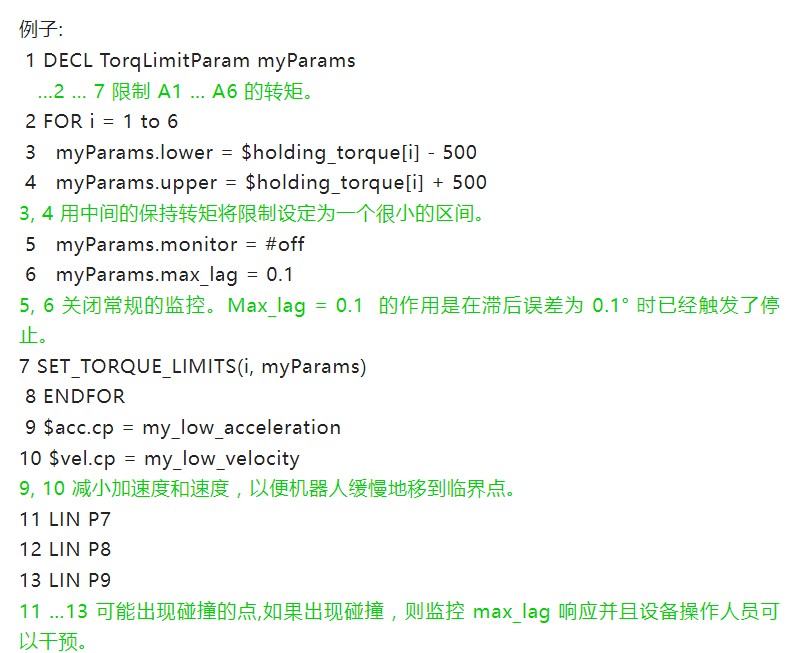
可以使用以下数据类型:BOOL,BYTE,CHAR,WCHAR,WORD,LWORD,DWORD,INT,UINT,USINT,SINT,LINT,ULINT,DINT,UDINT,REAL,LREAL。在类型为 ARRAY 或 STRUCT 的数据结构中也可使用这些数据类型。...
如果你想要制作一个遵循黑线行动的酷机器人。大概只需要在 2 小时内学习并制作就能够完成带有 PID 控制器的线跟随器机器人。...

ABB工业机器人安装系统时如何添加外轴?今天小编教会你们两种安装系统级添加外轴的方法(适用IRC5系统)...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




