完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
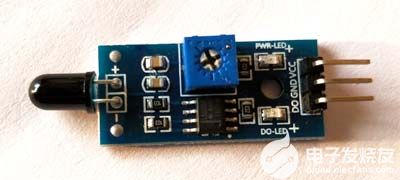
在这个项目中,我们将学习如何使用Arduino构建一个简单的机器人,它可以向火移动并在火周围抽水来扑灭火。这是一个非常简单的机器人,可以教我们机器人的基本概念;一旦您了解了以下基础知识,您就可以构建更复杂的机器人。所以让我们开始吧......
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。...
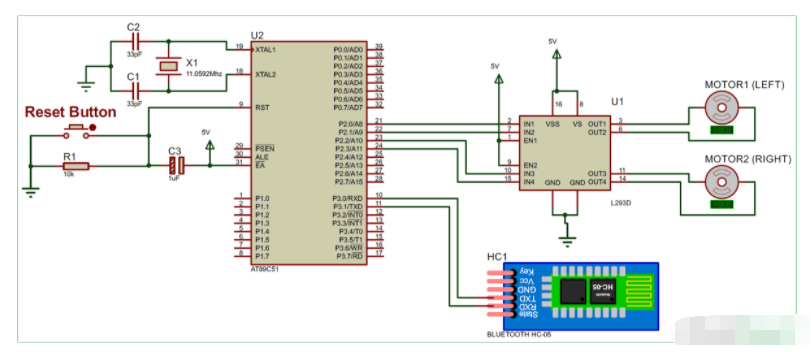
在这个项目中,我们将使用8051微控制器和蓝牙模块构建一个Android手机控制的机器人。该机器人是使用直流电机设计的,直流电机的方向将由从安卓应用程序收到的命令控制。机器人的状态被发送回安卓应用程序。该项目还将帮助HC-05蓝牙模块与8051微控制器的接口....
人类手臂的作用是将手移动到不同的位置。类似地,机器臂的作用则是移动末端执行器。您可以在机器臂上安装适用于特定应用场景的各种末端执行器。...
码垛动作指令:以使用具有趋近点、堆叠点、回退点的路径点作为位置 数据的动作指令,是码垛专用的动作指令。该位置数据通过码垛指令每次都 被改写。...
”→“KUKA Extension Bus (STS-X44)”→“EK1100 EtherCAT Coupler(2A E-Bus)”→“EL6752 DeviceNet Master”→“DeviceNet IO”,双击“Generic DeviceNet Device”,弹出 DeviceNe...
定期对ABB机器人的数据进行备份,是保证ABB机器人正常工作的良好习惯。ABB机器人数据备份的对象是所有正在系统内存运行的RAPID程序和系统参数。当机器人系统出现错乱或者重新安装新系统以后,可以通过备份快速地把机器人恢复到备份时的状态。...
处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好λ如果査不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毀。...
IMU通常包含一个3轴加速度计和一个3轴的陀螺仪,是测量物体三轴姿态角(或角度率)以及加速度的装置。...
相机非线性矫正2、相机与机器人做9点标定3、计算机器人的旋转中心4、相机通过公式计算得出最终输出结果注:由于选择中心距离视野很远,通常拟合出来的旋转中心存在比较大的误差,给定位精度造成影响。...
在我国,工业机器人广泛应用于制造业,不仅仅应用于汽车制造业,大到航天飞机的生产,军用装备,高铁的开发,小到圆珠笔的生产都有广泛的应用。并且已经从较为成熟的行业延伸到食品,医疗等领域。...
在本教程中,我们将在Arduino和MG995伺服电机的帮助下构建自己的机械臂。机器人总共有4个自由度(DOF),不包括夹具,可以通过电位计控制。除此之外,我们还将对其进行编程,使其具有录制和播放功能,以便我们可以记录动作并要求机械臂根据需要多次重复它。听起来很酷吧!!!所以让我们开始构建.......
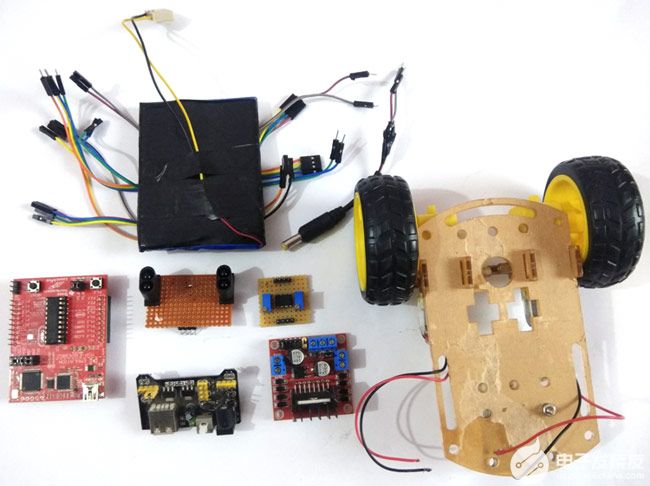
线路跟随机器人因其简单性而成为学生和初学者中流行的机器人项目之一。它遵循一条线,黑色或白色,具体取决于您如何对微控制器进行编程。在这里,我们使用德州仪器的 MSP430 启动板制作一个线路跟随机器人,它遵循黑线。...
根据中国移动机器人(AGV/AMR)产业联盟数据,新战略移动机器人产业研究所统计,2022年三季度工业应用移动机器人行业约有16家企业推出了超18款产品,涵盖各个类型。...
全球定位系统(GPS)作为一种机器人常用定位方式,受制于天气、无线电、遮挡等环境因素,导致导航系统实时性与可靠性难以保证,环境的未知以及机器人运动的不确定性会对SLAM系统的鲁棒性与稳定性提出更高要求,为了解决这一问题,有必要进一步研究SLAM以及惯性导航技术。...
在制造业中,工作人员通常在有毒化学品、密闭空间或重型机器等危险环境中工作。自主移动机器人使用传感器、人工智能和计算机视觉技术来观察和理解周围环境,并自主导航。...
对于程序中的某一范围的动作语句,偏移功能可将其已示教完成的位置转移到其他位置。偏移的形式包括:程序偏移,镜像偏移和角度输入偏移。...
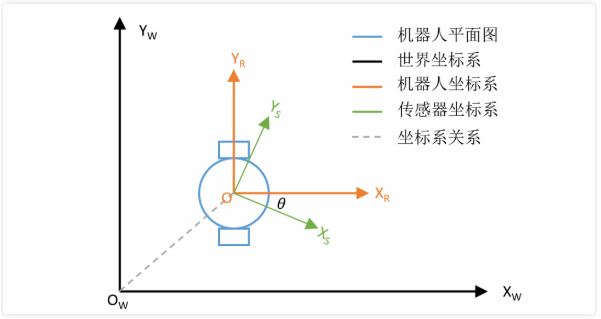
相信大家的机器人平台STM32端底层控制和机器人urdf建模都已经顺利完成了,在正式开始ros端编写机器人启动功能包之前,我们还不得不学习一些必要的理论知识。别担心数学不好,这里基本都是高中数学。下面我们开始,Are you ready?没准备好也开始了。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




