完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
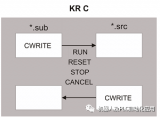
“CWRITE”语句能够使文字写入打开的通道,或者命令被写入命令通道。 应用实例: 数据 ( 写语句) 在KRC1 和装置间( PC, 智能传感器...). 转换。...
机器人自动化带来的是非标设计工作量的大量减少,只需要合理设计手爪、dress、一些相对标准的周边设备,就能完成复杂的自动化功能。这使得企业能以同样的人力成本完成更多的生产线的设计安装和调试,实现企业的规模扩张。...

极海智能扫地机器人应用方案,主控模块采用了APM32F407系列高性能MCU,该系列芯片拥有高主频、高性能、高集成、外设资源丰富等特点,结合GW8811系列低功耗蓝牙4.2芯片,可实现丰富、精准且高效的家居定位清扫功能。...

工业机器人的分类可以根据不同的标准进行,这里列举了几种常见的机器人分类方法。正确认识工业机器人的基本类型和特点,对于正确选型、规划生产线以及实现自动化生产都非常重要。...
机器人节约能源选项之C4----SMARPAT的锁屏。 随便选一个可以带键盘的 点击文字 ,出现键盘。点击WIN 选择setting--》control Pannel...

TheKPS 600 的作用: •主要的电源供应 •开始回路的电源供应 •刹车控制(主要6个轴的以及额外2个轴的) •通过Interbus来控制DSE-IBS的界面 •24 V 电压分配 •电池电路...

安全逻辑电路 ESC (Electronic Safety Circuit ,电子安全回路)是一种双信道、支持中央处理器的安全系统。它可对所有连接上的、与安全有关的元件进行持久监控。安全回路发生故障或中断时,驱动装置供电电源将关闭,由此可使机器人系统停止。...
定位精度和运动所需的时间是这种控制方式的两个主要技术指标。这种控制方式具有实现容易、定位精度要求不高的特点,因此,常被应用在上下料、搬运、点焊和在电路板上安插元件等只要求目标点处保持末端执行器位姿准确的作业中。...
柔性机器人和刚性机器人都是机器人技术的一种,但二者的设计和应用有很大的区别。 1. 结构设计: 就结构而言,刚性机器人一般采用关节连杆的设计结构,机器臂由多个关节构成,可进行多自由度的运动。而柔性机器人则采用多节段式设计,中间通过特殊的联轴器连接。柔性机器人结构柔软,柔韧性强,可弯曲和伸缩...
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号....

KLI 始终与 VxWorks 侧进行通讯。 与 Windows 只可通过选定的端口才能连接,具体端口已在 KSS 8.x 出厂时预设完毕。这种连接可通过存档功能、文件共享功能、远程桌面协议或WorkVisual 来建立。...

首先选择备份点击OK,把你的硬盘装回库卡柜,然后把U盘插入库卡柜开机,开机什么也不动等待10分钟左右,等待自动关机(等待的过程中什么也不要动切记等待关机)。...

未来战场上错综复杂的电磁频谱环境,人机混合的海量作战单元,虚实交叠的多域作战行动,决定着未来战场上的通信不可能都是点对点,可能是多点对多点的,是有人、无人和环境同时在线的一个超级指挥控制网,这也许就是“数据链”的智能化发展方向[1]。...
机器人模块中集成了一个拥有6自由度的高效机器人核心,在路径规划中,通过PLC-Open Part 4确保了最高自由度,同时仅通过调整参数就能非常方便地完成取放运动,无需机器人方面的专业知识。...
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。...
主体 - 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;...
可以参照基坐标对这些点示教。如果必须移动基坐标,例如由于工作面被移动,这些点也随之移动,但不必重新进行示教。 可以保存多少 BASE 坐标系取决于 WorkVisual 中的配置。默认:32 个 BASE坐标系。变量:BASE_DATA[1 … 32]。...
现代机器人绝大多数是基于模型控制的(Model-based Control),有模型的地方就会有误差,因此具体有多少误差需要补偿/校准取决于你用了什么样的模型。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




