完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
协作机器人(简称:cobots)越来越多地出现在制造业中,它们在共享区域与人类一起工作。在人机协作工厂中,避免协作机器人和人类同事发生碰撞,确保生产安全是至关重要的。...

机械臂对精度和运动稳定性的要求较高,因此计算量大、周期短,比移动机器人一般要高1到2个量级。移动机器人一般对同步精度要求不高,其配置相对较低。...

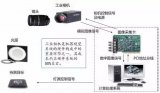
本文探讨了在嘈杂环境中利用机器学习技术进行机械臂动作识别的问题。通过使用视觉系统和深度学习模型,作者提出的方法在3x3网格环境中的井字棋游戏案例中得到验证。...

采用 XYZ 参考法时,首先使用已知的工具移向一个参考点,然后使用待测工具移向参考点。机器人控制器比较法兰位置,并计算出新工具的 TCP。...

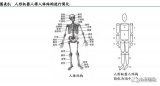
人形机器人诞生已有30 余年,由技术验证期向初步商业化过渡,产品行动能力随技术突 破不断提高。人形机器人的发展历程主要分为三个阶段。...
史陶比尔示教器常见故障及维修处理方案 1、示教器触摸不良或局部不灵(更换触摸面板) 2、示教器无显示(维修或更换内部主板或液晶屏) 3、示教器显示不良、竖线、竖带、花屏等(更换液晶屏) 4、示教器按键不良或不灵(更换按键面板)...

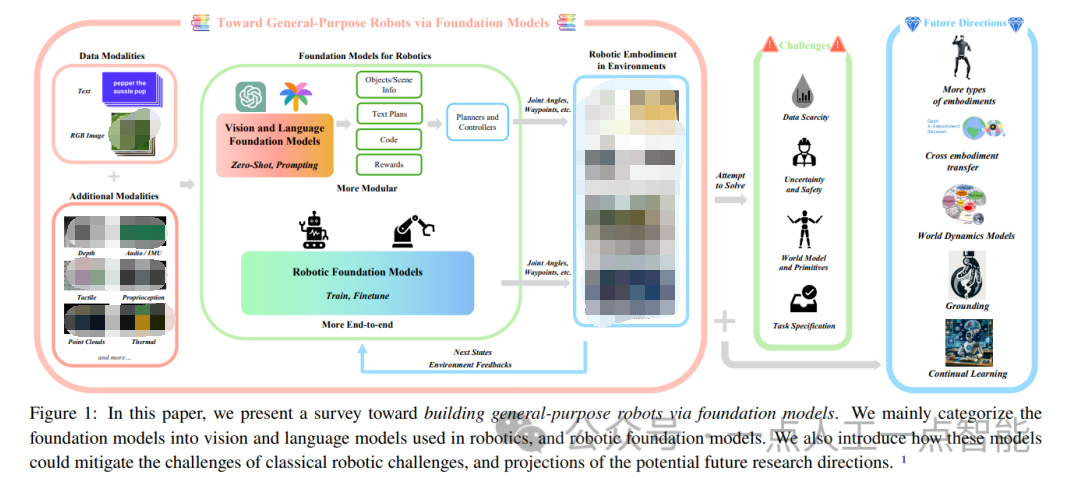
机器人是一种拥有无尽可能性的技术,尤其是当搭配了智能技术时。近段时间创造了许多变革性应用的大模型有望成为机器人的智慧大脑,帮助机器人感知和理解这个世界并制定决策和进行规划。...
工业机器人在恶劣条件下运行,即使设计时进行完善的设计规范,维护率可以降低,但是,仍必须定期进行常规检查和预防性维护。...

最大数量/BRAKE最多可以同时声明64个中断。中断的声明可以随时被新的声明覆盖。可以选择使用BRAKE声明中断。BRAKE语句在检测到声明的中断时立即执行。这意味着当进入中断程序时,制动过程已经开始。...

使用FANUC机器人进行作业之前,必须对相关工作人员进行培训,未经过培训的人员不得随意更改设置、不能随意进行操作。...
安装在示教器上的使能设备按钮(Enabling device),当按下一半时,系统变为电(MOTORS ON)模式。当松开或全部按下按钮时,系统变为电机关(MOTORS OFF)模式。...

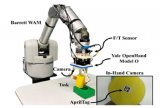
ByteDance Research 基于开源的多模态语言视觉大模型 OpenFlamingo 开发了开源、易用的 RoboFlamingo 机器人操作模型,只用单机就可以训练。...

海康机器人控制系统涵盖了RCS-2000 V4.0和RCS-Lite轻量级调度控制器,这两款控制系统在性能、效率、可靠性和扩展性方面实现了质的飞跃。为客户提供了更易用、更灵活、更低成本和更快交付的体验。...

机器人与视觉标定理论详解 A(x,y)绕B(rx0,ry0)旋转a度后的位置为C(x0,y0),则有如下关系式: x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0 y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0...

自主控制技术研究至今,先后出现了多种体系结构形式,目前被广泛应用于实践的是分布式体系结构,其各个功能模块作为相对独立的单元参与整个体系。...

根据CMR产业联盟数据,新战略移动机器人产业研究所统计,2022年度,中国市场企业整体销售工业应用移动机器人(AGV/AMR)93000台,较2021年增长29.17%,市场销售额达到185亿元,同比增长46.83%。...

基础模型在解决机器人技术中的数据稀缺问题上至关重要。它们为使用最少的特定数据学习和适应新任务提供了坚实的基础。...

控制柔度接触形成的理论是,约束可以不断添加,直到插入任务完成。值得注意的是,任何当前不受约束的自由度都可以被控制以执行其他任务,而无需修改系统的当前CF。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




