完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
库卡机器人的安全信号与IO模块是相互独立的,即安全信号不是通过IO信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。...

准备树莓派和 CRICKIT Hat 1、如果你已经安装了 CRICKIT Hat 的 40 针连接器的转接端子,请将其取下。 如果我们希望按钮引线适合而不被后面板压扁,我们需要帽子以非常低的外形安装在树莓派的顶部。 注意:如果你打算在树莓派上安装散热器,请使用非常低调的散热器以避免 ...

在示教器中编程调用程序的话,是可以通过proccall,而在robstudio中编程,则可以直接通过复制程序的名称,然后粘贴到main主程序中。 当然了,proccall调用子程序的数量也并非是无限的: “程序可相互调用,并反过来调用另一个程序。...

谐波减速机由波发生器、柔性齿轮、刚性齿轮三个基本构件组成,是一种靠波发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。...

瓦特连杆是用来作进直线运动的,一般见于车底。 瓦特连杆是由瓦特发明的,没错就是那个特别流弊改良了蒸汽机的瓦特。在瓦特连杆中,移动的中点自由度被限制,只得做近似直线运动。最早是用在瓦特蒸汽轮机上的,后来也用做汽车的悬架结构中了。...
自动化任务对提高效率而言至关重要,因此,即使您的机器人目前由人工控制,某些这类由人工控制的任务未来很可能也会实现自动化。看看目前的机器学习/人工智能硬件您就会发现,电源需求可能令人生畏,但 Vicor 解决方案已经满足了这些需求。...

RS60E凭借卓越的性能、简易的操作、优良的品质等特点,在机器人领域能尽其所能、一展所长,提供完善的解决方案,为客户持续创造价值,是小型六关节机器人、DELTA机器人及SCARA机器 人等的理想驱动产品选择。...

对于一个经典的SLAM问题,假设xt是t时刻的状态量,z1:t为时刻的观测量,u1:t是1:t时刻的控制量,m是地图,则SLAM需要求解的是在已知控制量、观测量概率分布的情况下,机器人的位姿状态以及地图最优估计的问题。...

金升阳非隔离降压/升降压电源KJB/KUB系列具有超宽输入电压、低空载功耗、高效率、集成多种保护功能等优势,为客户带来更优选择。...

机器视觉作为与人眼类似的机器仿生系统,从广义角度凡是通过光学装置获取真实物体的信息以及对相关信息的处理与执行都是机器视觉,这就包括了可见视觉以及非可见视觉,甚至包括人类视觉不能直接观察到的、物体内部信息的获取与处理等。...
基于搜索的路径规划算法已经较为成熟且得到了广泛应用,常常被用于游戏中人物和移动机器人的路径规划。...

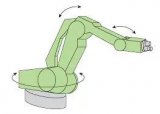
工业机器人的基本结构包括机身、臂部、手腕和指部。这些部件共同构成了机器人的运动系统,使其能够在三维空间中进行精确的定位和运动。...

AI 先从一块大约肥皂大小的块状物质开始,起初这团物质只会摇晃,完全无法行走。AI 知道自己的目标尚未达成,于是迅速迭代设计。...
更柔性化的自动化产线才能满足如今车企的生产需求,相对于柔性化程度不足的工业机器人而言,协作机器人同时拥有交互安全、即插即用、快速部署等优势,能够应对各种复杂工艺,极大降低改造成本,提升产线灵活性,充分满足当前汽车行业柔性智造需求。...

精确的校准能力使 Optimus 更高效地学习各种任务,并且仅使用视觉,其神经网络完全实现了 on-board 运行。 这样一来,Optimus 可以完全自主地将物体按颜色进行分类。...
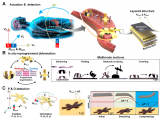
北京航空航天大学陈华伟教授课题组报道了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化。...
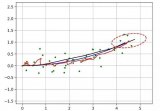
该算法利用扩展卡尔曼滤波器(Extended Kalman Filter, EKF)实现传感器混合本地化。 蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为EKF估算的路径。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




