完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
Pollard的并联机构 1962年,Gough发明了一种基于并联机构的六自由度轮胎检测装置; 并联机器人 1965年,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,这种机构也是目前应用最广的并联机构,被称为Gough-Stewa...
ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。 导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人执行的安全路径。...

拆卸步骤 : 1.将机器人置于所有轴0度的位置(特殊情况也可以置于其他姿态),做好MC备份和镜像备份,然后断开控制柜的电源 2.从机器人底座的配线板拆除控制柜侧的电缆...

大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合。...

那么什么是标定呢?标定(calibration)包含两方面的意思:一是指使用标准的计量仪器对所使用仪器或设备的准确度(精度)进行检测,确认是否符合标准;二是校准,消除误差。...

人形机器人新增更多电机需求,伺服电机和步进电机均具备适配性。 未来人形机器人单台电机用量有望超40个,而伺服电机是主要配置,包括四肢及躯干,占据大部分用量份额。...

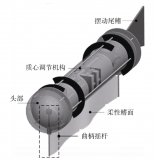
传统机器人比较僵化,通常不适合执行精细任务或近距离与人类互动,而软体机器人的灵活性和柔顺性降低了人机交互过程中的潜在风险,并适应更广泛的任务。...

控制柜 (CCU)包含两块电路板 (CIB 控制柜接口板和 PMB 电源管理板),是机器人控制系统所有组件的配电装置和通讯接口。所有数据通过内部通讯传输给控制系统,并在那里继续处理。...

一个带有分割掩码的输入RGB-D图像被提供给两个神经网络,分别产生一个6自由度的抓取姿势和一个物体的3D点云重建。通过将抓取姿势投影到点云中最近的点来优化抓取姿势,从而产生最终的输出抓取。...

工位背景:机器人带抓手抓件,将抓手放到工位里,然后PLC和夹具将机器人抓手固定,机器人于抓手脱开,其他机器人开始焊接,工作结束后机器人在去抓抓手,离开工位,再去抓件。...

作为现代仓储物流应用中的重要一环,越来越多的自主移动机器人AMR在货物运输中投入使用,AMR能自动化地实现货物在工位之间的智能化搬运。...
机器人控制器由机器人控制器硬件和机器人控制器软件组成。机器人控制器的软件部分是工业机器人的“心脏”,随着科技的发展,工业机器人从下位机到上位机的应用软件方面都有了不同程度的研究成果。...

电动机是将电能转换为机械能的装置,反之,他也具有将旋转机械能转换为电能的发电功能。换言之,伺服电机是一种能量转换装置,可将电能转换为机械能,同时也能通过其反过程来达到制动的目的。...
带有RFID安全导航功能的重载AMR,使该公司能够为仓库构建一个完整的、降低劳动力成本的解决方案,从而在提高物流和仓储设施的准确性和清洁度的同时,还可以缓解当今劳动力短缺的挑战。...
团队通过样机的航行实验研究了不同的运动参数下潜水器的推进性能,该机器鱼可以在1Hz的扑动频率下以0.18m/s的速度游动。2022年,中国科学院的喻俊志等研制了一款后掠角可变的MPF仿蝠鲼机器鱼。该...
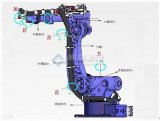
机器人的基本架构通常包括中央处理器 (CPU)、电源/电池管理单元、电池充电器、无线通信 (COM) 模块、人机界面 (HMI)、传感器及驱动模块(有刷和无刷电机)。那么,服务机器人的核心技术到底有哪些呢?...

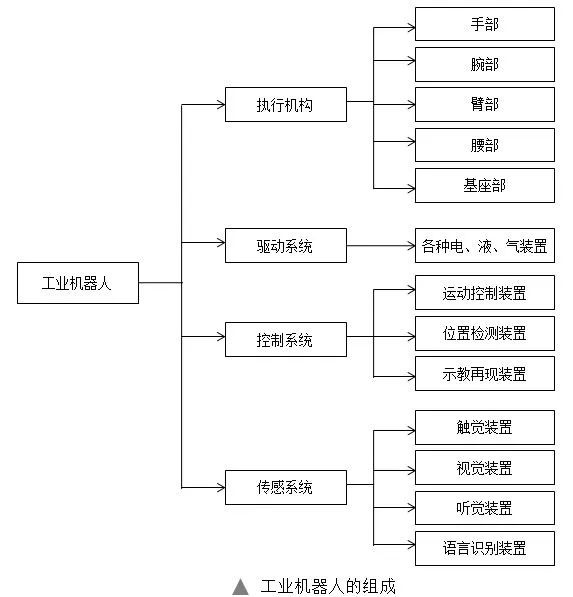
机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。工业机器人控制技术的主要任务便是控制工业机器人在工作空间中的活动范围、姿势和轨迹、动作的时间等。具有编程简单、软件菜单操纵、友好的人机交互界面、在线操纵提示和运用方便...
库卡机器人的安全信号与IO模块是相互独立的,即安全信号不是通过IO信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。...

关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




