完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器具有多自由度、寄生推力小,以及效率高等优势。...
爬壁机器人: - 爬壁机器人是专门设计用于在垂直壁面上爬行的机器人。 - 爬壁机器人通常具有特殊的机构或结构设计,如吸盘、切削或粘附机构等,以实现在垂直壁面上的附着和行走能力。 - 爬壁机器人主要用于墙壁、玻璃、建筑物等表面的检测、检修、清洁等任务,能够在垂直表面上精确移动。...
爬壁机器人可以根据其工作原理、设计和应用领域进行分类。以下是一些常见的爬壁机器人分类:1. 吸盘式爬壁机器人;2. 磁力式爬壁机器人;3. 轮式爬壁机器人。...
先进制造机器人研究所(ARM)的首席技术官Chuck Brandt指出,让机器人专家在房间里尖叫着跑出来的最快方法之一,是让工业机器人处理布料,这是一个出了名的疑难问题。...
机器人的组成部分与人类极为类似。一个典型的机器人有一套可移动的身体结构、一部类似于马达的装置、一套传感系统、一个电源和一个用来控制所有这些要素的计算机“大脑”。从本质上讲,机器人是由人类制造的“动物”,它们是模仿人类和动物行为的机器。...
1) 打开 Cell Browser 2) 点击 Fixtures 3) 右键点击 Generic Simple Conveyor...

特斯拉的人形机器人中共有28个运动关节,包括三种旋转执行器和三种线性执行器。分布于肩髋等需要大角度旋转关节所采用的主要是旋转执行器,而线性执行器主要分布于膝肘等摆动角度不大的单自由度关节,以及腕踝两个双自由度但是体积紧凑的关节。...

“伺服”表示电机在闭环控制系统中运行,该系统使用来自编码器或旋转变压器(通常集成到电机或安装在电机上)的反馈来比较电机的实际位置、速度或扭矩与指令的差距,进而实现精确运动,属于机器人核心技术之一。...
SLAM至今已历经三十多年的研究,这里给出经典视觉SLAM框架,这个框架本身及其包含的算法已经基本定型,并且已经在许多视觉程序库和机器人程序库中提供。...

三点法操作步骤: 记录接近点1 a.移动光标到接近点1(Approachpoint1); b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点; c.按【SHIFT】+F5【RECORD】(位置记录)记录...

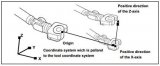
六点示教法包括六点(XY)示教法、和六点(XZ)示教法。 六点(XZ)示教法中,取一个方向原点、一个与所需工具坐标系平行的X轴方向点、一个XZ平面上的点。此时,通过笛卡尔点动或工具点动进行示教,以使工具的倾斜保持不变。...
如果在机器人夹持器上安装了带有5/3通阀的手动夹持器,则在调用maKro342“夹持器打开/吸盘关闭”之后,必须在PSPS中设置“夹持组打开”的相关输出。这样可以确保手动张紧器保持其位置。相应的输出必须在装载位置复位。...

Llama 2是 Meta 发布了其最新的大型语言模型,Llama2 是基于 Transformer 的人工神经网络,以一系列单词作为输入,递归地预测下一个单词来生成文本。...

变位机协调运动是一种运动控制方法。使用协调运动,可以使得两个运动组的运动速度相对恒定。结合变位机的协调功能,有利于持续回转型焊缝(譬如“环形焊缝”)的示教编程和工艺实现,有利于复杂曲线焊缝(譬如“马鞍形焊缝”)的示教编程和工艺实现。...

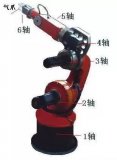
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




