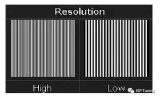
分辨率(Resolution)描述的是对空间细节分辨的能力,又称分辨力、鉴别率、鉴别力、分析力、解像....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-10 10:55
•1055次阅读
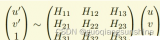
相机只有旋转而无平移的时候,两视图的对极约束不成立,基础矩阵F为零矩阵,这时候需要使用单应矩阵H场景....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-10 10:52
•707次阅读
大多数常见的偏振滤波器可分为三种类型:时间分割、振幅分割或焦平面分割(表1)。在时间分割的偏振测量中....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-10 10:39
•1181次阅读

最后是在ADE20K val上的LeaderBoard,通过榜单也可以看出,在榜单的前几名中,Tra....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-07 09:39
•787次阅读

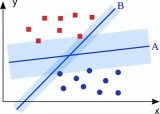
支持向量机的目标是拟合获得最大边缘的超平面(两个类中最近点的距离)。可以直观地表明,这样的超平面(A....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-07 09:33
•604次阅读
对于电气工程师来讲,图纸是相当重要的,所以制图软件是必须要掌握的,这是毫无疑问的。而且电路设计和电气....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-07 09:31
•1542次阅读
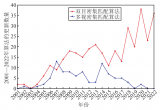
这份报告总结了互联网公司的排名,毫不意外,腾讯、阿里、百度、美团、拼多多、京东等互联网巨头依然稳居前....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-07 09:27
•2096次阅读

internal feedback:使用LLM去预测生成的plan取得成功的概率、Tree of T....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-05 14:49
•2395次阅读

有许多不同的方法和算法可用于从2D图像执行3D重建。选择的方法取决于诸如输入图像的质量、摄像机校准信....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-05 14:07
•3199次阅读

首先来详细说明为什么Transformer的计算复杂度是 。将Transformer中标准的Atte....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-04 15:31
•1156次阅读
主要针对光学成像的逆问题,是由能从二维光强度阵列恢复三维可见表面物理性质的一系列处理过程组成。这里各....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-04 10:33
•1053次阅读
Lama Cleaner 是由 SOTA AI 模型提供支持的免费开源图像修复工具。可以从图片中移除....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-04 10:23
•3314次阅读
基于导纳控制的机器人拖动示教是一种常用的机器人控制策略,它允许人与机器人直接互动,实现自然、直观的控....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-04 09:48
•5584次阅读
设三种操作的输入都是同一个矩阵(暂且先别管为什么输入是同一个矩阵),这里暂且定为长度为L的句子,每个....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-04 09:40
•842次阅读
本篇文章主要分析,常规的ROS机器人是如何使用Navigation导航包实现实时定位的,定位精度的决....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 12-03 11:00
•2971次阅读

lxml,快速,易用、灵活的HTML和XML处理库,功能超强,在遇到有缺陷、不规范的xml时,Pyt....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-30 17:00
•1137次阅读
基于边缘检测的分析不易受整体光照强度变化的影响,同时利用边缘信息容易凸显目标信息和达到简化处理的目的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-30 16:56
•1204次阅读

变量h r e s h_{res}和v r e s v_{res}非常依赖于所使用的LIDAR传感器....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-30 16:53
•1273次阅读

Sensor,作为摄像头模组最重要的一部分,其总价值占比超过50%,在摄像头模组及相关行业,提到“S....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-30 16:19
•5517次阅读

标检测是在图片或视频中定位物体的过程。其中一个著名的目标检测框架是YOLO(You Only Loo....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-30 11:03
•816次阅读

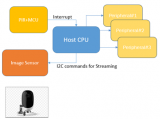
在机器视觉普及的时代,图像传感器作为其“眼睛”有着越来越多的各样的应用。安森美(onsemi)的图像....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-28 17:01
•525次阅读
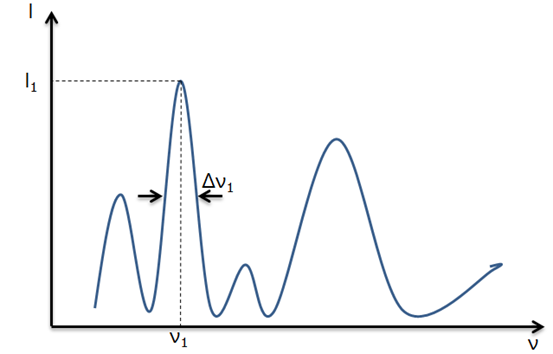
光谱学(spectroscopy)是通过物质与不同频率(或波长)的电磁波之间的相互作用来研究其性质的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-28 16:55
•8914次阅读
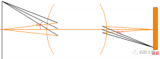
先来区分两个概念,镜头的照度和相对照度。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-28 16:53
•2326次阅读
在硬件设备(CPU、GPU)不同时,完全的可复现性无法保证,即使随机种子相同。但是,在同一个设备上,....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-27 10:38
•383次阅读

在图像调试过程,当发现一个问题时,很多时候都要通过 dump raw 图像来分析,如果raw图像上有....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-27 10:35
•1883次阅读

自适应权重法是推动局部密集匹配算法发展的关键。自2006年Yoon等[53]首次提出可以在匹配质量与....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-27 10:29
•1716次阅读
在点胶缺陷检测系统的设计过程中,需要对光学检测时的硬件进行选型。如图所示,考虑到胶条为透明胶,存在反....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-25 15:16
•1217次阅读

光学效率是指光源将输入电能转换为可见光的效率。光学效率通常用百分比表示,表示光源的能量利用效率。高光....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-25 15:12
•998次阅读

help:用来查询已知命令的用法。例如已知inv是用来计算反矩阵,键入help inv即可得知有关i....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-25 14:37
•3263次阅读
在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-25 14:36
•1025次阅读






 工商网监
工商网监