BundleFusion是一种稠密的实时室内场景三维重建算法框架。输入为RGB-D相机采集的并且是对....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-16 09:37
•607次阅读

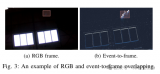
这篇文章的基本原理是利用事件驱动的视觉传感器(DVS)和传统的RGB摄像头相结合,实现在边缘设备上实....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-13 12:15
•785次阅读
为了使用三维运动先验正则化估计的三维轨迹,模型另外预测了每条轨迹的刚性嵌入,这使能够软地分组表现出相....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-13 12:12
•1008次阅读

基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 04-01 12:44
•545次阅读
这篇论文介绍了一种名为RT-DETR的实时检测Transformer,是第一个实时端到端目标检测器。
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 03-06 09:24
•1071次阅读

基于Transformer架构的大型模型在人工智能领域中发挥着日益重要的作用,特别是在自然语言处理(....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-22 16:27
•485次阅读

背景部分介绍了3D点云应用领域中公开可访问的数据集的重要性,这些数据集对于分析和比较各种模型至关重要....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-22 16:16
•772次阅读

控制模块可以分为控制逻辑和控制算法两大部分,逻辑用于处理各种输入输出的选择、切换等,算法是输入输出具....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-20 10:43
•427次阅读

精确、快速地划定清晰的边界和鲁棒的语义对于许多下游机器人任务至关重要,例如机器人抓取和操作、实时语义....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 02-20 10:30
•683次阅读

基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-26 10:48
•537次阅读

Uni3D在少样本点云部件分割任务上也展示出了卓越的性能。下表结果显示,在各种实验条件下,Uni3D....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-25 10:10
•368次阅读

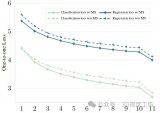
混合监督会产生比基线更低的一对一损失。x轴对应epoch,y轴对应一对一监督的训练损失。虚线和实线分....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-23 14:14
•394次阅读
S3DIS Area 5的大规模全景分割结果,共有9.2 M个点( 78M预采样)和1863个真实"....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-22 14:03
•450次阅读

发自动驾驶论文哪少的了数据集,今天笔者将为大家推荐一篇最新的综述,总结了200多个自动驾驶领域的数据....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-19 10:48
•836次阅读

本研究提出了ExTraCT框架,利用自然语言进行轨迹校正。该框架结合了大型语言模型(LLMs)用于自....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-19 10:45
•329次阅读

考虑到3D点云的稀疏性质,iDet3D设计了负点击模拟 (NCS),通过减少误报预测来提高准确性。还....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-16 16:08
•431次阅读

另外,之前被网友调侃是“和谐号”车头的理想MEGA也将于3月1日正式发布,比原定发布时间推迟了2个多....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-14 10:00
•1225次阅读

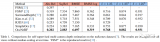
BEV感知的主要工作。在输入模态下," L "为LiDAR," SC "为单相机," MC "为多相....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-14 09:53
•1112次阅读

BEV是Bird's Eye View 的缩写,意为鸟瞰视图。在自动驾驶领域,BEV 是指....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-13 09:41
•3016次阅读

TUM数据集上相机跟踪结果,评价指标是ATE RMSE [ m ] (↓),表示相关文献未提及这个数....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-12 11:24
•316次阅读

图像匹配是各种视觉应用中基本且关键的任务,如同时定位与地图构建( Simultaneous Loca....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-06 10:24
•506次阅读

本研究提出了一种自监督的多摄相机3D占据预测方法,名为OccNeRF。该方法旨在解决无界场景的建模问....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-02 14:53
•300次阅读
本文提出了一种全新的学习型PatchMatch MVS框架,DS-PMNet,并嵌入了DeformS....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 01-02 09:25
•394次阅读

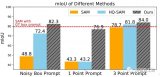
SAM、HQ-SAM、Stable-SAM在提供次优提示时的性能比较,Stable-SAM明显优于其....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-29 14:35
•498次阅读
DisCo方法:提出了一种基于扩散的跨模态形状重建方法。该方法利用三平面扩散模型,结合部分点云和多视....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-26 16:44
•342次阅读
Gaussian-SLAM提出了用于seeding和优化Gaussian splats的新策略,以将....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-26 16:38
•962次阅读

该标定过程仅需10分钟,能够自动完成所有校准步骤,无需人工干预。通过该标定解决方案,相机模组能够实现....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-19 15:14
•970次阅读
今天笔者将为大家分享NVIDIA的最新开源方案FoundationPose,是一个用于 6D 姿态估....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-19 09:58
•679次阅读

这个速度计框架以事件数据和IMU测量作为输入。图中所示分别为:(a) 无人机在狭窄走廊中进行攻击行为....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-18 15:43
•328次阅读

可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的....
![的头像]() 3D视觉工坊 发表于
3D视觉工坊 发表于 12-17 10:01
•668次阅读




 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号

