完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
机器人的零点标定是需要将机器人的机械信息和位置信息同步,来定义机器人的物理位置,从而使机器人能够准确地按照原定位置移动。...
机器人轴数越多,机器人控制系统越复杂,其造价越高,三维空间中能到达的点越多,而且相对灵活这是毋庸置疑的,从这点来看,机器人轴数越多越先进是正确的,却不能说越好,为什么呢?...
这种超灵敏电子皮肤采用电容式传感原理,包括两片柔性电极和一个具有仿生结构的离子凝胶层——离子凝胶层模仿鹅肠菜花粉的多级微纳结构,使该电子皮肤具备了极高的灵敏度和较宽的测量范围,能够为手术机器人提供精细操作下的接触力反馈。...
控制器设计上有两种思路,集中式和分散式。集中式的控制器设计将机器人的大多数电子模块(驱动电源模块、伺服驱动模块、通信模块、IO模块)都集成在控制器中,大多机器人厂商会选择这种设计,整体打包给下游厂商。...
我们先来理清自主导航的框架,其关键是自主定位和路径规划。针对这两个核心功能,ROS提供了一套完整的框架支持,收到导航目标位置后,机器人只需要发布必要的传感器信息,框架中的功能包即可帮助机器人完成导航。...
使用KRL对机器人进行编程时,在程序中使用的数据会有相应的类型来处理这些数据,变量就是用来保存这些数据的容器,每个变量都属于一个专门的数据类型,在使用前必须声明数据类型。...
市场方面,GGII数据显示,2022年前三季度,国内移动机器人市场销量约5.8万台,同比增速低于30%。预计2022年市场销量将达到8.18万台,同比增长28%左右,其中,出口占比近26%,创历史新高。...
机器人用户在应用中的误区排在第一位的是低估了有效负荷和惯性需求。通常大多是由于在计算负荷时没有包括机械臂末端所装工具的重量构成的。其次构成这个错误的缘由是低估或者完好忽略了偏心负荷产生的惯性力。...
可编程的逻辑控制器(PLCs)提供了一种廉价的无噪声的运动控制方法。梯级逻辑编程一直是PLCs的主要内容,新模型以人机界面(HMI)面板为代表,这些面板是编程代码的可视化表示。PLCs可用于控制多种动作控制装置和机械的逻辑控制。...
空间任意两个坐标系的变换关系确实需要6个参数来表示,然而,在建立各个连杆的坐标系时,我们可以拟定一些规则,使得坐标系满足某些约束,从而只需4个参数则可以表示两个坐标系的变换关系。...
对于示教程序可以用MOTOSIMEG软件标定 对于内置PLC程序可以直接用文本编辑(*.lst)或MOTOMAN专用梯形图编辑软件。...
首先用Rate的构造函数实例化一个对象loop_rate。调用的构造函数如下。可见,构造函数使用输入完成了对三个参数的初始化。...
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人代替人类完成生产是未来制造业重要的发展趋势,是实现智能制造的基础,也是未来实现工业自动化、数字化、智能化的保障。生产加工环境恶劣、人口老龄化带来劳动力紧缺、人工培训成本高等现状,推动着工业机器人需求增长。...
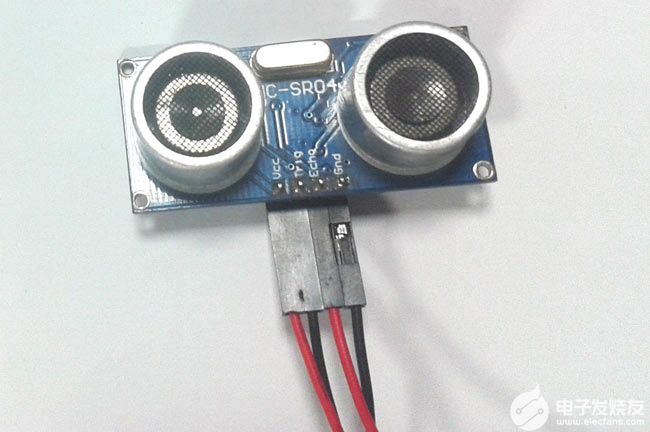
自动地板清洁剂并不是什么新鲜事,但它们都有一个共同的问题。它们对于它们所做的事情来说都太昂贵了。今天,我们将制作一款自动家庭清洁机器人,其成本仅为市场上的一小部分。这个机器人可以检测它前面的障碍物和物体,并可以继续移动,避开障碍物,直到整个房间被清理干净。它附有一个小刷子来清洁地板。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1




