SLAM 背后的核心思想是让机器人或自主系统能够探索未知环境并创建该环境的地图,同时确定其在生成....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-16 10:57
•644次阅读
概述 YOLOv10 是由清华大学研究人员利用 Ultralytics Python 软件包开发的,....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-16 10:23
•520次阅读

阈值的基本概念是为了简化图像以进行分析。当我们将图像转换为灰度图像时,必须记住灰度图像仍然至少有25....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-16 10:16
•269次阅读
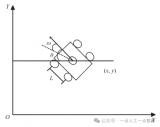
摘要: 该文对多无人智能车以领航-跟随法在复杂环境下运动的编队控制问题进行了探讨,通过采用闭环控制律....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-16 10:12
•400次阅读
今天,给大家分享一篇来自知乎的一篇关于目标检测相关的一些内容,
本文基于Pytorch进行编写....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-14 16:39
•221次阅读

摘要:小倍率大视场的双远心物镜具有低畸变、大景深的优点,在机器视觉工业在线检测领域应用广泛。根据双远....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-14 16:33
•329次阅读

背景介绍 机器视觉系统由图像获取,预处理和分析模块组成,这些模块打算像人类视觉系统一样执行检测,....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-14 11:38
•296次阅读

在研究机器视觉算法之前,我们需要先了解机器视觉应用中涉及的基本数据结构。Halcon数据结构主要有图....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-14 10:20
•426次阅读

本文对近年来提出的主动学习图像分类算法进行了详细综述,并根据所用样本数据处理及模型优化方案,将现有算....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-14 10:12
•333次阅读

来自中国清华大学的研究人员推出了YOLOv10,这是一种具有卓越进步的创新模型,展示了在计算机视觉领....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-13 17:12
•754次阅读
一、文章概述 1.1 摘 要 即时定位与地图构建(simultaneous localization....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-12 10:30
•713次阅读

目标检测在计算机视觉领域中具有重要意义。YOLOv5(You Only Look One-level....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-11 10:38
•1096次阅读

MTF测试是价值中立的量化工具,分数则否
业余摄影玩家们对手边的器材,多少都有一点好奇心,总想....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-11 10:36
•741次阅读

车牌识别作为现代化智能交通系统中重要的环节,对提升路网效率以及缓解城市交通压力等问题具有重要的社会意....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-11 10:29
•206次阅读

航空建筑深度估计是三维数字城市重建中的一项重要任务,基于深度学习的多视图立体(MVS)方法在该领域取....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-07 10:16
•236次阅读

下面是一个关于使用Python在几行代码中分析城市轮廓线的快速教程。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-07 10:14
•241次阅读

YOLO长期以来一直是目标检测任务的首选模型之一。它既快速又准确。此外,其API简洁易用。运行训练或....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-05 17:15
•1072次阅读
点云是世界的一种非结构化三维数据表示,通常由激光雷达传感器、立体相机或深度传感器采集。它由一系列单个....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-29 09:21
•195次阅读
本文我们将总结5种搭建开源大语言模型服务的方法,每种都附带详细的操作步骤,以及各自的优缺点。
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-29 09:17
•205次阅读
LinK3D的核心思想和基于我们的LinK3D的两个LiDAR扫描的匹配结果。绿色线是有效匹配。当前....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-30 12:55
•572次阅读

为了更清晰地学习Pytorch中的激活函数,并对比它们之间的不同,这里对最新版本的Pytorch中的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-30 09:26
•564次阅读

卡尔曼滤波以及其扩展算法能够应用于目标状态估计,如果这个目标是行人,那么就是行人状态估计(或者说行人....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-29 09:46
•1102次阅读

多目标跟踪是计算机视觉领域中的一个重要任务,它旨在从视频或图像序列中准确地检测和跟踪多个移动目标。不....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-28 09:42
•1933次阅读

Linux为视频采集设备制定了标准的V4L2接口,并在内核中实现了其基础框架V4L2 Core。用户....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-25 14:41
•1590次阅读

去模糊算法对三维图像堆栈的每个二维平面进行操作。最近邻算法是最常见的去模糊技术,其通过模糊相邻平面(....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-24 11:43
•594次阅读
深度学习系统的优势在于,它们会随着训练数据的增多而变得更好。为了维护一个即使在复杂情况下也能表现良好....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-24 10:17
•651次阅读
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-19 11:41
•677次阅读
在train.py中,定义从何处收集训练数据。我们应该将20%的数据分开以自动用于验证。我们还定义了....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-15 10:00
•627次阅读

ORB-SLAM是一种基于特征的单目视觉SLAM系统,广泛用于实时三维地图构建和机器人定位。该系统使....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-08 10:17
•2945次阅读

在Roofline模型可以直观展示一张曲线图,其中x轴表示AI(Arithmetic Intensi....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 04-07 15:32
•1006次阅读




 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

