以下示例显示了如何通过一个可变下标寻址函数块中的多重实例。这些实例将在一个 FOR 循环中迭代处理。

这是一个时代的过去,老古董的东西了这次与大家分享一下。 在IBSCPI1文件中选择SVC文件名称....

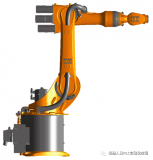
KUKA机器人的”Dry run空转”概念. 空转如果自动运行中程序运行中断,并且机器人离开程序编定....
简介 拓扑视图是硬件和网络编辑器的三个工作区中的一个。在此处可执行以下任务: 显示以太网拓扑 组态以....

● 控制结构 – IF ... THEN – CASE ... OF ... – FOR ... T....

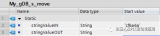
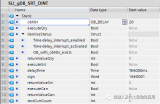
说明 PLC 数据类型 (UDT) 是一种复杂的用户自定义数据类型,用于声明一个变量。这种数据类型是....

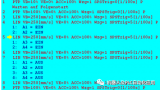
APP_INT[5] 使用来进行STEP跳步的变量 DEF MAKROSTEP(Function :....

TSEND“ & „TRCV “ 发送和接收数据(TCP 和ISO - on- TCP)

设备视图是硬件和网络编辑器的三个工作区中的一个。

如何分配工业以太网 FC 电缆的各导线到 IE FC RJ45 插头的针脚?
在SIEMENSI工业通讯中,最常用的是串口;Profibus;MPI;以太网通讯,在下表中分别对其....
例如在使用TCP通讯建立连接时采用客户端服务器模式,这种模式又常常被称为主从式架构,简称为C/S结构....

例如在使用TCP通讯建立连接时采用客户端服务器模式,这种模式又常常被称为主从式架构,简称为C/S结构....

网络视图是硬件和网络编辑器的三个工作区中的一个。在此处可执行以下任务。

当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。一旦机器人运动到机械....
在此示例中,将用于程序代码可视化和监控的对象连接到控制程序。您先前已在 STEP 7 中创建了一个程....

在图形区域、相应的表格区域或巡视窗口内,可轻松编辑所有三个视图(网络视图、设备视图、拓扑视图)的硬件....

在网络视图中将设备从硬件目录添加到组态后,即可向设备中添加模块。

IO控制器的标识。集成的PROFINET接口始终具有简短描述"PN-IO"。 设备名称 设备名称是....

可以使用此指令将参数 IN 中字符串 (W)STRING 的内容写入在参数 OUT 中指定的数据区域....
该 MODBUSPN 指令允许在带有集成 PN 接口的 CPU 和支持 Modbus/TCP 协议的....

在以下示例中,将读取延时中断 OB (OB20) 的状态,设置新的延时并启动或禁用 OB20。
从 STL 程序块调用的程序块不提供 EN 和 ENO 参数。无论创建程序块时采用何种编程语言,都可....
可将自己新建的项目加载到 HMI 设备并在运行系统中执行。 为此,组态设备和 HMI 设备之间....

画面浏览指过程画面的组态体系。 使用画面浏览,为项目定义一个固定的浏览结构。 操作员可以使用运行....
显示所有 Profinet 参与者的状态信息和导航到 Profinet 详细诊断

FOR语句在控制变量处于指定的值范围内时用来重复语句序列。控制变量必须是INT或DINT类型的本地变....

在配置硬件组件时,STEP 7 将为每个硬件对象(如模块、接口或模块端口,甚至是智能设备的传输区)自....

根据硬件中断模块触发的示例来说明 S7-1500 CPU 中面向事件的程序执行的功能原理。

所有 PROFINET 设备均采用 TCP/IP 协议,因此需要 IP 地址才能进行以太网操作。




 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

