当在数据列表中达成一致时,GLOBAL可用于变量、信号和自定义数据类型编号。
PUBLIC专门用于....
“概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。

下表描述了如何为下载设置内存保留而不重新初始化。

默认情况下,为 S7 - 1200/1500 的所有新创建的块启用优化块访问。可为 OB、FB 和....

示例:在块上设置内存保留

类型与您在项目中的使用位置相关联。当类型发生变化时,项目中的使用位置可以自动更新。

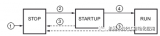
通过适当编写启动 OB,可以在启动程序中为循环程序指定一些初始化变量。对启动 OB 的数量没有要求。....
在梯形图(LAD)和功能块图(FBD)中有些指令具有 ENO (使能输出) 。

对于S7- 300/400 控制器,硬件和软件组件的识别由逻辑地址或诊断地址执行。

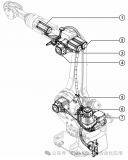
拆卸 A4 电机和 A5 电机,以下工作步骤相同。
通过 smartPAD 2 可以对 KR C5 进行全面操作和编程。smartPAD 2 是一台独立....

很多工业现场的 Modbus TCP 通信应用中,常常需要一个 P LC控制器通过Modbus TC....

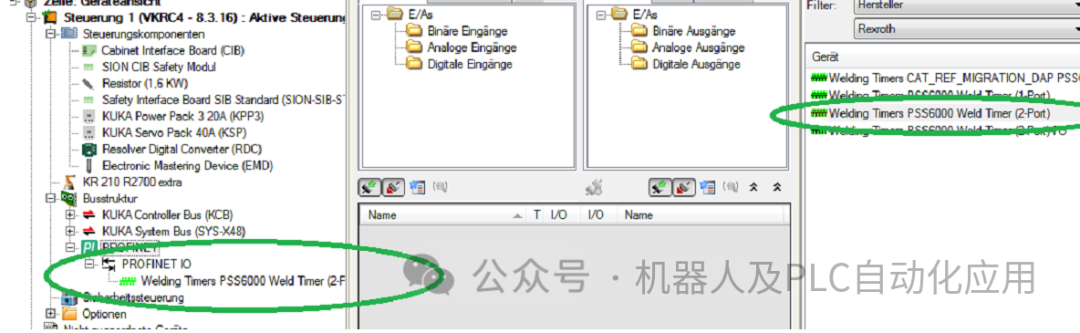
从“目录”窗口打开“选项”选项卡,为所有标准机器人选择“KS28_Basic and SPS Dev....
间接寻址,使用数组的符号地址访问
以下步骤将介绍如何对状态指示灯进行编程。状态指示灯指示加热室的工作模式。当加热室处于工作状态时,变量....

修改组态中PC站地址保持其与X2口的实际IP地址一致(默认为192.168.1.1),如果不知道IP....

有些情况需要为PLC DB块变量添加一些属性,常规的做法是在DB块中选中这个变量,然后打开变量属性输....

西门子博图SCL练习1:使用FC计算平均值

在SCL V11中,可以检查“扩展状态信息”。与SCL V5.x相反,始终创建最小化的调试信息,这允....

以下步骤将介绍如何在循环中断 OB“PID [OB200]”中调用工艺对象“PID_Compact”....

搜索字符串变量
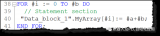
用功能 StrFind() 可以搜索字符串变量的字符串。
Result ....
选择不一致的调用,然后在上下文菜单(鼠标右键)中选择函数“Update”。
然后会出现一个窗口,其....

有三种方法可以创建实例数据块:
当第一次调用FB时,用户指定应该使用的FB的实例DB。这将打开一个....

全局数据块(FB、FC)
只有调用具有选定全局数据块的块时,才会显示块的程序状态。

与功能块(FC)相比,功能块(FB)具有存储器。这意味着功能块被分配了一个本地数据块,即所谓的实例数....

对于 PROFINET,可通过 STEP 7 中的以下选项来评估诊断。

在实例项目中,为了简化起见,将假设加热室启动时里面的温度已经达到了 75°C。

数据日志文件以 CSV 格式存储在永久性闪存中。可以使用以下两种方法管理、查看数据日志。

从步骤3开始监控宏:如果一个步骤超过了允许的最大持续时间10s,机器人控制器会显示熔化超时宏步骤。默....

分配列表概述了哪个字节使用存储区输入(I)、输出(Q)、位存储器(M)的哪个位,以及使用了哪些SIM....




 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

