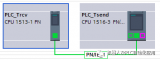
在以下示例中,将在 S7-1500 系列的两个 CPU 间创建一个编程连接,并将数据记录从 CPU ....
运动条件被用来阻止机器人。 机器人只有在完全满足编程运动条件的情况下才能移动。 在线形式FB ONL....

一般的KUKA程序: 1 PTP P0 2 SPLINE 3 SPL P1 4 SPL ....

使用“加载”指令,可加载累加器 1 中特定操作数的内容。
注意:根据应用程序的不同,停靠时不必单独投影所有参与者。一个参与者的配置就足够了(例如,如果所有码头....

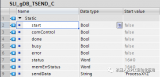
要求 全局数据块已打开。 操作步骤 要声明一个 ARRAY 数据类型的变量,请按以下步骤操作: 在“....
SIMATIC MMC 卡是 S7-300-CPU 的一个存储器模块。可将 MMC 卡组态为装载存储....
DB_ANY 数据类型用来标识任意数据块。对于 S7-1200/1500 系列的 CPU,可以选择访....

全局数据块中的变量可以按符号名或绝对地址进行寻址。对于符号寻址,可以使用数据块的名称和变量名,并用圆....
数据记录 数据是指在过程中采集并保存在所连接的某一自动化系统内存中的信息。例如,它们以温度、填充量或....

Graph程序在运行过程中,某些情况下需要将Sequence暂停去解决问题,当问题解决后,需要接着当....

在几何光学和阴极射线管(CRT)显示中。畸变是对直线投影的一种偏移。简单来说直线投影是场景内的一条直....

在以下示例中,在 S7-1500 系列的两个 CPU 间创建一个编程连接,并将一个字符串从 CPU ....
可使用“设备和网络”(Devices & Networks) 编辑器,组态通过 PROFINET....
该模块将Robot的输出数据复制到Robot结构中。

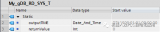
简介 使用使能输出 ENO,可检测和处理某些运行系统错误。后续指令的执行取决于该使能输出的信号状态。....
说明 使用“扫描 RLO 的信号上升沿”指令,可查询逻辑运算结果 (RLO) 的信号状态从“0”到“....

说明 可以使用该指令读取 CPU 时钟的当前日期和当前时间(模块时间)。 在此指令的 OUT 输出参....
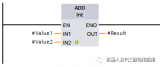
计算方程式以下示例程序显示了如何使用三个运算指令计算以下方程式:RESULT = ((A + B) ....
通过详细比较可以确定存在块版本不同的确切位置。用户通过以下颜色编码可以尽快找到这些位置:差异所在的行....

使用“满足条件时执行”指令可以重复执行程序循环,直至不满足执行条件为止。该条件是结果为布尔值(TRU....
CASE:创建多路分支 说明 使用“创建多路分支”指令,可以根据表达式的值执行多个指令序列中的一个。....

FB 951 F_ROB_NOT F应用程序组件F_ROB_NOTF(FB951)在F应用程序部件....

块调用环境对话框 如果已在项目环境内部打开块,将显示此对话框。 利用此对话框中的选项,能够为需要调试....

使用“扫描操作数的信号上升沿”指令,可以确定所指定操作数(<操作数 1>)的信号状态是否从“0”变为“1”。

数据类型 INT 的操作数长度为 16 位,并由两部分组成:一部分是符号,另一部分是数值。位 0 到....

在引导电流稳定时间(5ms)后,线性电机启动螺柱提升至距工件预定距离。然后我们接收引导电流电弧。在引....

与它相配合还要有相对应的USER用户程序组建,只要是标准用户程就行,不能和激光焊的标准组件混用。

使用SCA粘合控制的示例,显示了模拟输出的配置和配置。 大众标准规定的涂胶模拟量IO范围 奥迪标准的....
说明 使用该指令,可以将在输入 IN 中指定的十六进制数转换为 ASCII 字符串。转换结果存储到参....





 工商网监
工商网监