如何让陪伴机器人更懂家庭
随着ChatGPT等AI的出现,《her》似乎不再是科幻。大家开始探索AI陪聊、AI心理咨询,甚至是....
INDEMIND助力打造世界首款分体式陪伴机器人
近日,一年一度的“科技春晚”CES 2025正式拉开帷幕。作为展示最新技术成果和创新产品的关键平台,....
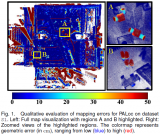
一种基于MASt3R的实时稠密SLAM系统
本文提出了一种即插即用的单目SLAM系统,能够在15FPS的帧率下生成全局一致的位姿和稠密几何图形。....
INDEMIND创新视觉技术助力机器人清洁模式革新
自扫拖功能的上线,扫地机器人在清洁系统上的死磕便从未停止。然而,随着各类创新技术越加越多,扫地机器人....


INDEMIND立体视觉技术让机器人落地更稳
即便服务机器人经历市场降温,行业内卷,玩家们却依然趋之若鹜,纷纷入局,背后到底有什么魔力?


开发小型机器人面临哪些难题
尽管不同商用场景的大多区域都十分相似,但非标准化的场景属性无法避免的导致了不少corner case....
基于视觉语言模型的导航框架VLMnav
本文提出了一种将视觉语言模型(VLM)转换为端到端导航策略的具体框架。不依赖于感知、规划和控制之间的....
INDEMIND为具身智能量身打造通用性视觉感知技术
随着大模型的蓬勃发展以及硬件技术的持续迭代,具身智能作为人工智能的关键分支,正逐渐成为全球范围内的新....






三维点云配准过程详解:算法原理及推导
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近....








 工商网监
工商网监