如何让多相机视觉SLAM系统更易于部署且对环境更具鲁棒性?本文提出了一种适用于任意排列多相机的通用视....

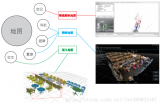
本文提出了一种新方法,通过使用点到平面匹配将VIO/VSLAM系统生成的稀疏3D点云与数字孪生体进行....

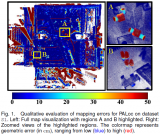
在SLAM中评估大规模的点云地图仍颇具挑战,主要原因在于缺乏统一、稳健且高效的评估框架。本文提出了M....
即便服务机器人经历市场降温,行业内卷,玩家们却依然趋之若鹜,纷纷入局,背后到底有什么魔力?
生成式预训练Transformer(GPT)被吹捧为将彻底改变机器人技术。但实际应用中,GPT需要庞....

语义同步定位与建图(SLAM)系统在对邻近的语义相似物体进行建图时面临困境,特别是在复杂的室内环境中....

尽管不同商用场景的大多区域都十分相似,但非标准化的场景属性无法避免的导致了不少corner case....
本文提出了一种将视觉语言模型(VLM)转换为端到端导航策略的具体框架。不依赖于感知、规划和控制之间的....
在追求松弛感的路上,每个人的方式或许各有不同,但相同的是,我们会不约而同的先为生活减负。
随着大模型的蓬勃发展以及硬件技术的持续迭代,具身智能作为人工智能的关键分支,正逐渐成为全球范围内的新....
扫地机器人内卷的终点是技术和价值,价格只是附属品。
当所有人开始掘金时,INDEMIND决定做一个卖铲子的人。
在本文中,我们提出了一种完全分布式的点线协同视觉惯性导航系统。我们通过蒙特卡罗模拟和真实环境数据集,....

在非静态环境中进行地图绘制和定位是机器人学的基本问题。之前的方法大多关注静态和高度动态的物体,但在半....

既能保证效率和精度,又无需GPU,行业第一个达到此目标的视觉动态SLAM系统。

一直以来,商用清洁机器人的应用场景主要集中在大型商场、超市、写字楼等,为什么1000平米以下的小型商....

不可置否,激光雷达已经成为扫地机器人的“耶路撒冷”。
地图点/路标点:将图像上被观察到的特征点通过三角化等方式进行深度恢复,我们就可以得到其对应的在三维空....

如何规划机器人的运动方式是机器人开发领域的一大课题,本文分享GitHub的一个机器人技术中常用的路径....

能够看到,市面上无论是石头、科沃斯、还是云鲸等头部厂商,其高端产品基本都是激光+视觉融合方案,并且基....
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近....
双目立体视觉一直是机器视觉研究领域的发展热点和难点,“热”是因为双目立体视觉有着及其广阔的应用前景,....

图像分割(Image Segmentation)是计算机视觉领域中的一项重要基础技术,是图像理解中的....

关于利用OpenCV进行颜色分类,本文包含了HSV介绍及应用、cv2.inRange及应用、RGB与....
没有人怀疑,VSLAM将是推动机器人再次迭代的关键之一。
与以往基于学习的视觉定位算法的区别在于:以前的方法往往需要数小时或数天的训练,而且每个新场景都需要再....

在这篇文章中,我们将学习如何在OpenCV中使用基于深度学习的边缘检测,它比目前流行的canny边缘....

虽然纯视觉方案有着更高经济性、可扩展性的独特优势,但一般认为纯视觉方案的精准度和鲁棒性还达不到激光雷....

SLAM 是 Simultaneous Localization and Mapping 的缩写,中....
SLAM本质上是一个状态估计问题,根据传感器做划分,主要是激光、视觉两大类。激光SLAM的研究在理论....





 工商网监
工商网监