气伺服焊钳为什么会发出钳E1超出软件限制报警
大家在调试气伺服焊钳时,可能经常遇到这个故障"Zange E1 ausserhalb Softwar....
更改DB的调用类型
在用户程序中创建数据块 (DB) 以存储代码块的数据。用户程序中的所有程序块都可访问全局 DB 中的....
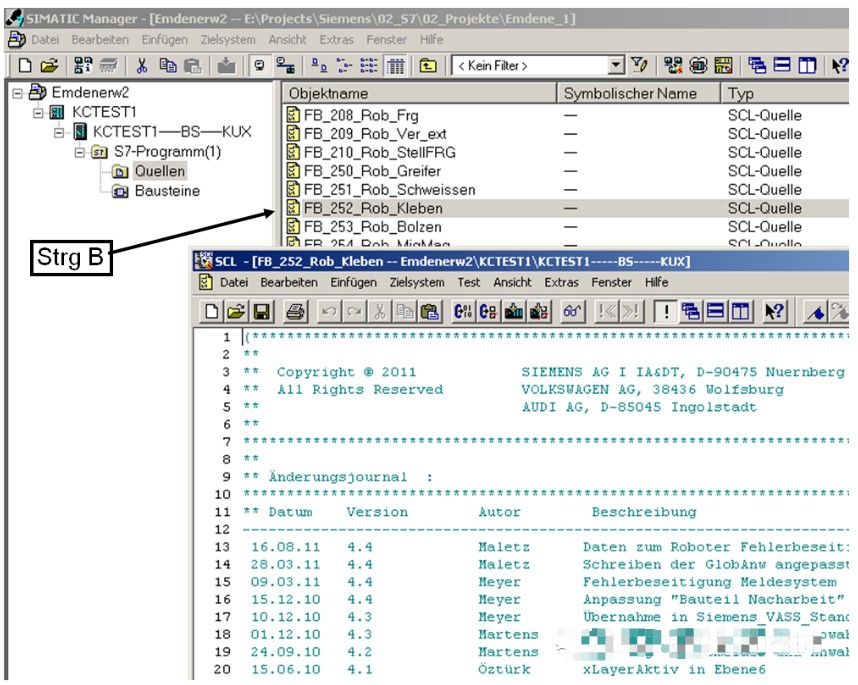
浅谈STEP7-5.5-F程序FB块中的更改连接
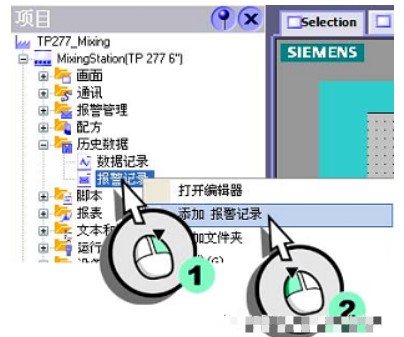
添加了新内容:机器人急停控制模块
添加机器人安全控制块
添加功能块故障报警控制
....
AGV小车的基础控制
分别对应连接CM模块和LXM28A伺服的CAN_H、CAN_L和SHLD引脚,在CM模块CAN_H和....
移动字符串的规则
使用“块移动”指令,可将存储区(源区域)的内容移动到其它存储区(目标区域)。移动操作沿地址升序方向执....
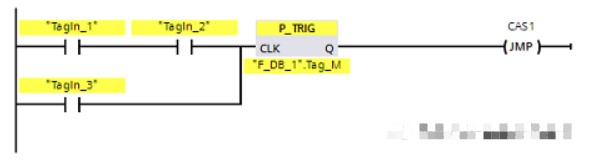
关于FC641顺序块控制
该块根据输入变量 "VerAuto" 和 "VerHand"(具体视已经选择的模式(手动或自动))生....
PN/PN Coupler模块进行控制器与控制器之间的相关通信
在TIA安全系统中S7-1500F和S7-1200F 的PROFINET接口之间可以借助 PN/PN....
Struct结构数据类型
Struct类型是一种由多个不同数据类型元素组成的数据结构,其元素可以是基本数据类型,也可以是Str....
TIA V1X中安装GSD的方法介绍
在“硬件目录”中“其它现场设备”下可以找到刚才添加的IO设备,并可看到其对应的GSDML文件的版本信....

在STEP7环境中MRP环网中无交换机配置指南
示例中采用一台S7-300 PN 接口的CPU作为PN控制器,采用一台IM 153-4 PN的设备做....
Struct应用案例
MOVE指令支持相同Struct类型的直接传送,如果传送双方是大量数据,并且结构相同,可以先分别将双....
增加看门狗时间办法
介质冗余协议(MRP) 符合IEC 61158 的 PROFINET 标准的组成部分。关于支持MRP....
清除存储卡中的项目数据
如果电脑设置了显示隐藏文件,还可以看到隐藏的系统文件,如图8所示,这些系统文件是不能删除的,也不允许....
KUKAVASS标准中的时间控制
$TIMER_FLAG[] 可用于在经过一定时间后触发的中断条件。如果相应的计时器以负值启动,则 $....


读取S7-1200CPU的系统/本地时钟
从上图可以看出,读出的系统时间和本地时间相差8小时,这是因为S7-1200CPU所设置的时区与格林威....
使用ProDiag实例数据库,设置ProDiag许可证
在项目树中,双击 S7-1500 CPU 的“设备组态”(Device configuration)....
KUKA激活转矩运行:SET_TORQUE_LIMITS()
关闭常规的监控。不因为否则将不必要地触发监控,而是因为与该示例相反它们不够严格。取而代之,将其中一个....
WinCC flexible传送项目到HMI设备
使用项目向导创建项目时,连接参数已经被设置。定义地址 1 和 2 分别用于 HMI设备和控制器。控制....
直线电机焊接前的焊接参数监测
原则上,直线电机是普通的扬声器。通过电流和张力,可以控制横向路径(升力)和施加的力。路径测量规则用于....
SCL如何使用经典Step7的接口型式
在块接口选择“文本视图”,此设置默认选择表格视图。设置完,再新建的SCL块即使用所选择的视图。之前新....
访问1500S OPC UA服务器系列的步骤
第1步:打开博图,选择“添加新设备”-》“PC系统”,组态对应硬件,本例程为图示硬件。
如何分配F-IO模块的PROFIsafe安全地址
每个故障安全模块都有自己的 PROFIsafe 地址(F_destination_address),....
TIA Portal中S7-1500F CPU与ET200SP安全模块的配置例程
点击“新建项目”输入项目名称(CPU1511F_ET200SP)点击“OK”,完成项目创建, 如图2....





 工商网监
工商网监