TCP通信通过网络调试助手与S7-1200建立TCP连接
S7-1200 V4.5 版本开始支持网络视图组态开放式用户通信连接,不需要在程序中调用 TCON ....
添加HMI设备的步骤介绍
2. 指定名称并选择一个 HMI 设备。 保留“启动设备向导”(Start device w....
Sivarc画面规则:建立程序块与画面的链接
7) 完成后,可以看到在HMI中自动生成一个画面,名称为“B_DB”,查看是否与程序块B的背景数据....
PLC程序无法下载诊断的原因有哪些
本例子的CPU为6ES7 315-2EH14-0AB0,查看CPU技术规范,可见M区最大数目为204....
KUKA编程中$FCT_CALL的存在
字符“a”将通过命令通道 $FCT_CALL 写入文件MyTest.TXT。如果文件已经存在,则在打....
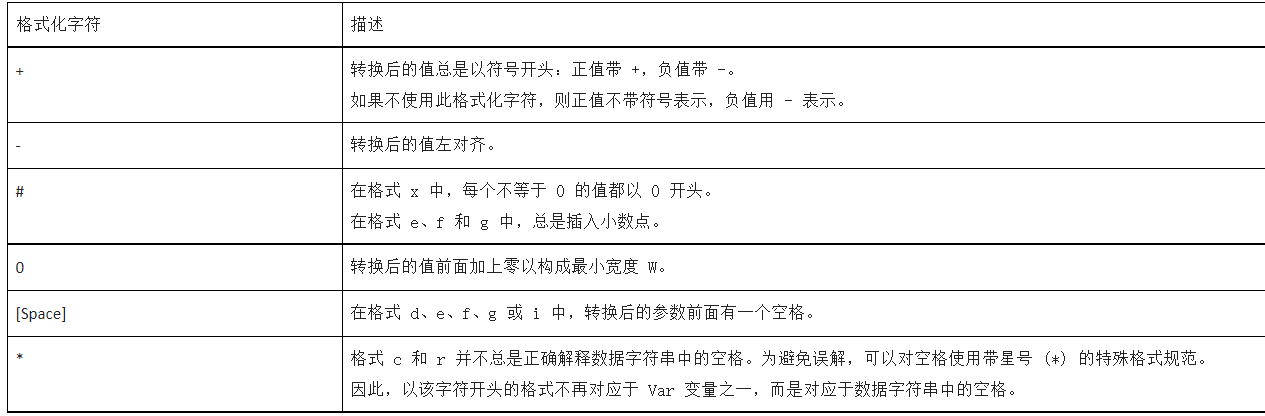
KUKA机器人高级编程SWRITE的用法
在数组的情况下,规范“Z”可用于定义要考虑的数组元素的数量。如果没有为“Z”指定值,则考虑所有数组元....
KUKA机器人中-TCP通讯里的纯理论的东西
CAST_TO使得使用单个CWRITE语句处理多达4 KB的数据成为可能。CAST_TO将单个变量分....
通过openness功能启动SiVArc服务
确保传递有效的 GenerationOption 参数。如果未传递参数,将生成 SiVArc 并为 ....
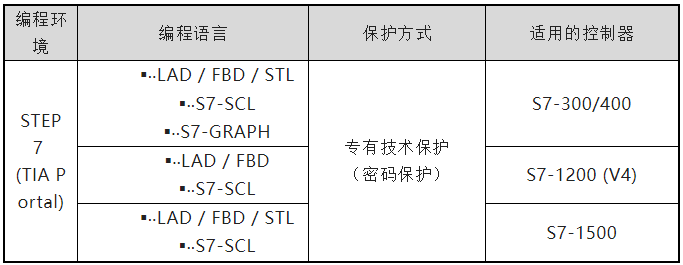
使用TIA Portal进行工程设计的开放接口
TIA Portal Openness V16 中提供了以下新功能和创新。您可以在产品文档的各个部分....
KUKA系统变量:$ERR
ON_ERROR_PROCEED 可用于抑制由以下程序行触发的运行时错误消息。机器人控制器跳过触发错....
KUKA编程:命令通道$FCT_CALL的功能
对于使用 CWRITE 的每个函数调用,都要进行检查以查看函数是成功执行还是因错误而中止。如果发生错....
电动机温升过高的原因
如电动机在阳光下曝晒,环境温度超过40℃,或在通风不畅的环境条件下运行,会引起电动机温升道高。可搭简....
读取KUKAC4.8.3系统机器人轴参数!
SGL_SSD_ERROR(OWNER_NAME[], OWNER_AXNAME[], VAR_NA....
KUKA一套程序的建立(序列)
机器人控制系统等待上一级控制系统给出“程序启动”(SRB)的信号。在该信号给出后则启动此序列程序。
数据日志的使用
在目标 CPU 的设备配置中启用 Web 服务器,“设备视图”→“鼠标选中CPU”→“属性”→“We....
S7-1200如何创建AT覆盖变量
创建一个 S7-1200 的项目,在程序块中新建一个 FB 块(或者 FC 块),右击 FB 块进入....
KUKA工具之CZ电伺服铆钳ECKOLD技术
铆接是用钢、铝或不锈钢制成的板材和型材的连接技术。•铆接技术允许通过局部冷成型连接两个或多个细金属板....
电机/制动器启动程序激活
显示启动助手。按照启动助手的说明进行操作。您可以使用 [back] 和 [next] 按钮在对话框之....
滚床控制SEW变频器MOVIfit的PLC控制
将带PROFIsafe选件S11的MOVIPRO与DC24V电源连接后,必须用MOVITOOLSMo....
数据块(DB)的结构
实例数据块是指派给特定功能块的数据块。它们功能块的指定的本地数据。当FB被用户程序调用时,这些数据块....
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入门
Modbus数据在TCP/IP以太网上传输,支持Ethernet II和802.3两种帧格式,Mod....
标准PLC数据类型 (UDT)之间的差别
要创建 F 型 PLC 数据类型 (UDT) ,请启用“添加新 PLC 数据类型”(Add n....
命令通道$FCT_CALL 的功能
默认情况下,函数访问的文件存储在本地目录C:KRCROBOTERUserFiles。存储在那里的文件....
MCR(主站控制继电器)依存
只有在将中间输出线圈置于激活的MCR区内时,才会激活MCR依存关系。在激活的MCR区内,如果MCR处....
S7-300输入模块SM321是否支持连接NPN和PNP接近开关?
除了问题1中所述,可以考虑使用分布式IO站点中采用分布式IO模块;根据不同型号区分是否支持NPN或P....
SCL-添加接通延迟定时器
对于指令地址,请选择“Run” 变量。在“指令”(Instruction) 任务卡中,展开“定时器....
PROFINET接口实现开放的ISOonTCp通信
要通过S7-PN CPU的集成PROFINET接口实现开放的ISOonTCp通信,不能再硬件组态中完....
KUKA激活转矩运行:SET_TORQUE_LIMITS
如果一个极限已设定 (或两个)并且然后设定另一个极限,和现在通过新的极限得出一个空的区间,则新的极限....





 工商网监
工商网监