KUKAC4测量工具坐标的作用是什么
BASE坐标用来确定机器人空间上的坐标点,而TOOL则用来确定机器人以什么样的姿态去这个轨迹点.
WINCC博途以太网下载方式分享
带以太网口的西门子一代精简面板和二代精简面板均支持以太网下载,本章使用TKP600Basic col....
用VARSTATE()可以询问变量的状态
ARSTATE() 是带有 VAR_STATE 类型返还值的函数。VAR_STATE 是在系统中如下....
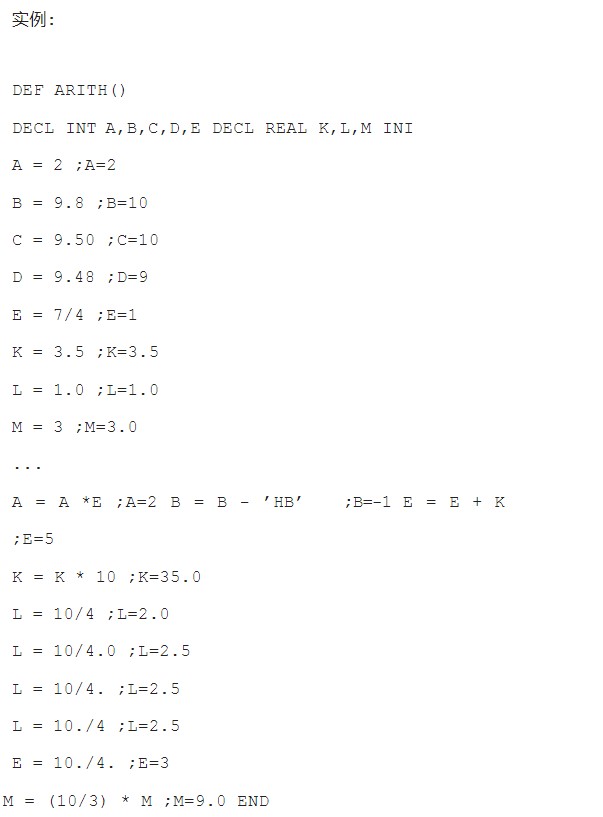
KUKA机器人结构化机器人程序分析
KRL 是一种类似PASCAL的高级编程语言,利用KRL语言编程能够实现结构化编程处理复杂的任务。
MOVIFIT更换EBOX+指示灯步骤说明
必要时可以根据实际运行情况关闭电压层 24V_S,以便集中关闭设备内的执行器 。
F-CPU进入STOP模式的操作步骤
F-CPU 进入 STOP 模式,在诊断缓冲区出现 “Data corruption in the ....
基于以太网的SIMATIC NET服务器与S7-1200通信
这种组态方式可以实现 OPC UA 客户端通过 SIMATIC NET 访问 S7-1200 CPU....
HALCON机器视觉算法包解析
最近一直在使用机器人与上位机进行视觉抓取技术的调试,对C# 也稍有了解,就这样我开始接触到了HALC....
西门子CPU-1200在线和诊断工具-比较离线CPU与在线CPU
可以将在线 CPU 中的代码块与项目中的代码块进行比较。如果项目中的代码块与在线 CPU的代码块不匹....
S7-1500和S7-1200 F-CPU间Flexible F-Link通信
从STEP7 Safety V15.1开始,S7-1200和S7-1500 F-CPU间可以通过Fl....
BUFF传送连的使用调试V1.27版分析
当小车通过通行检测传感器以及上件积放停止器上无小车时,传感器会将反馈给PLC ,PLC会给出一个可以....
浅析ENDWHILE编程设定当型循环
当型循环。一直重复指令块直到满足了特定条件的循环。如果不满足条件,则用 ENDWHILE 后的下一个....
滚床控制SEW变频器MOVIfit的PLC控制/S11安全控制设置
功能:改变电压及频率,SEW程序部分,初始化及IPOS程序(AM1001).
结构数据类型Struct介绍
Struct类型是一种由多个不同数据类型元素组成的数据结构,其元素可以是基本数据类型,也可以是Str....
S7 Fault Tolerant connection/S7容错连接介绍
S7容错连接是S7-400H(High available高可用性)系列CPU才能支持的冗余通讯方式....
S7-300集成PN口作为Profinet智能设备
如图1所示,S7-300 PLC(192.168.0.1/24)与 S7-1500 PLC (192....
S7-300集成PN口作为Profinnet控制器使用
PROFINET IO的IO现场设备在PROFINET上有着相同的等级,在网络组态时分配给一个IO控....
VASS-KUKA机器人力矩监控TECH2_ Koll_Ueb变量的控制使用简介
如果机器人与物体碰撞,则机器人控制器会增加轴转矩以克服阻力。这可能会损坏机器人,工具或其他物体。
S7-300集成DP口与S7-200的DP主从通信设计实现
S7-300与S7-200通过EM277 进行PROFIBUS DP通讯,需要在STEP7中进行S7....
KUKA大众版8.2系统外部轴配置
KUKA大众版8.2系统,配置外部轴需要在项目中进行设置选择KPP1项目用于外部轴1和KPP2使用外....





 工商网监
工商网监