FESTO伺服气动焊枪系统讲解
伺服气动焊枪系统支持各种现场总线协议。该设计的基础是CPX现场总线节点FB35 – Profinet....
VASS KUKA电伺服焊钳的SG_Background控制
SERVOZANGE (伺服钳):选择焊钳--在列表中只显示已激活选项 后台流程已激活 的焊钳。
S7-1200填充块指令(U)FILL_BLK使用说明
(U)FILL_BLK指令是当EN条件满足时,实现用输入变量批量填充输出区域的功能。
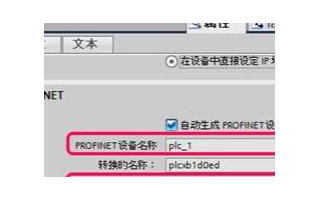
S7-300集成PN口作为Profinnet控制器使用方法
PROFINET IO的IO现场设备在PROFINET上有着相同的等级,在网络组态时分配给一个IO控....
KUKA-大众标准伺服焊钳设备之USE_R的使用
在调用的USER程序中:Tech_ EZSP Zange = Nr1 Service ProgNr=....
浅析Tucker螺柱焊V1.10版
实际上,直线电机就是一个信号放大器。通过LMC控制电机动作,又通过光栅测量系统来检测电机动作的距离。
S7-1500从站的激活与取消激活
通过指令“D_ACT_DP”,可根据需要取消激活和激活所组态的 DP 从站/PROFINET IO ....
S7-1500系统内使用ET200S 1SI模块实现Modbus主站通信
打开软件TIA PORTAL STEP7 V16,点击项目->新建...创建一新项目,项目名称为S7....
浅析KUKA数学标准功能
角度正切的定义是直角三角形的邻边 (X) 除以对边 (Y)。如果两个侧边的长度已知,则可以用反正切计....
S1200对DP从站一致性数据读写
CPU 为所有基本数据类型(如Word 或 DWord)和所有系统定义的结构(例如 IEC_TIME....
PROFIBUS DP主从配置方法步骤说明
从硬件目录/ 分布式I/O 中将ET200S拖入网络视图,鼠标拖动从站通信接口到主站接口, 释放鼠标....
S7-1200与S7-1200/S7-1500不同项目下UDP通信
S7-1200 与 S7-1200 之间的以太网通信可以通过 UDP 协议来实现。本列中使用TSEN....
ALBANY卷帘门的调试心得V1版
预运行光电元件在距离底部型材下方约 100 mm (3.94”) 处运行(取决于门型)。该元件会在门....
ALBANY卷帘门的调试心得V1版分享
磁性开关沿着连接器和夹持器安装在侧架里里面,以进行高度调整。提供有相关的电缆和连接器。
BUFF传送连的使用调试V1版步骤简析
当小车通过通行检测传感器以及上件积放停止器上无小车时,传感器会将反馈给PLC ,PLC会给出一个可以....
BOLLHOFF博尔豪夫液压铆钳的注意事项有哪些
1号油管的进枪是通过12KYH7比例阀和12KYH3得电,P与B相通。进枪时3号油管相通,12KYH....
KUKA机器人将参数传递到子程序的步骤
建议:始终将一个参数传递到相同数据类型的变量中。可以将参数传递到另一个数据类型中,但是有特定的限制。
机器人读取系统时钟并按照十进制显示
下列程序中,DB1.DBB0~DB1.DBB8分别对应需要显示的十进制表示的:年/月/日/时/分/秒....
KUKA机器人C4外部自动控制最终版介绍
如果机器人程序要由上级控制器(例如PLC)集中控制,则可以使用”自动外部”界面来执行。
KUKA机器人C4外部自动控制最终版-v1介绍
上级控制器通过自动外部接口将用于机器人过程的信号(例如运动使能,故障确认,程序启动等)传输到机器人控....
分享一下ALBANY卷帘门的调试心得
磁性开关沿着连接器和夹持器安装在侧架里里面,以进行高度调整。提供有相关的电缆和连接器。
由KUKA外部自动展开的PLC控制程序的分析
KRC-PLC LPTK ----------8–程序到达最后一点LPKT=14-在FOLGE程....
怎样去读取DP或PN总线上各站点的状态呢?
在用户程序(OB1)中,使用 SFC51 "RDSYSST" 读出 CPU 的系统状态列表。
新的故障安全通信Flexible F-Link
灵活的 F-Link 通信地址签名 – 用于更好地分类变化的离散 F 签名
• 区分硬件/软件和通....





 工商网监
工商网监