如何获取矩形的测量及矩形位置参数?
首先给出一个问题:如下边一个图片中,如何获取矩形的测量,也就是说,需要更准确的矩形位置参数?
西门子SCL中的SEL函数的使用
除ARRAY和ATRUCT数据类型和参数数据类型外的所有类型均作为输入值。所有参数化变量均应是同一类....
对齐C型气动焊钳上的圆形电极臂
在对齐固定式电极臂后必须注意要重新计算 TCP 点。在对齐前要注意焊钳随附资料中的报告和图纸。第 1....
ALBANY卷帘门的调试心得V1版
预运行光电元件在距离底部型材下方约 100 mm (3.94”) 处运行(取决于门型)。该元件会在门....
S7-300/400集成PN口 MODBUS TCP通讯(TIA)
下面以S7-300单站系统及Modbus Slave软件为例,详细介绍如何将S7-300单站系统CP....
KUKA使用SUBMIT解释器
SUBMIT 解释器与机器人解释器和 I/O 管理器共享系统功率,其中,机器人解释器和 I/O 管理....
KUKA机器人高级编程CWRITE的用法V3.1
CWRITE可以通过命令通道$CMD将语句传输到解释器。除了机器人口译员和系统提交外,扩展提交也可在....
WorkVisual将机器人控制系统配给实际应用的机器人控制系统步骤
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 Wor....
MOVIFIT更换EBOX+指示灯说明V1.30
如果您已经设置了数据管理并且使用的是AMX1001单元,则只需断开旧单元的连接并连接替换单元,即可更....
I-DEVICE(智能设备)是什么
通过如下的步骤配置 PC的 IP地址:选择电脑的“ 控制面板 > 网络和共享 > 本地连接>属性”打....
S7-300集成PN口作为Profinet智能设备
S7-300 PLC(192.168.0.1/24)与 S7-1500 PLC (192.168.0....
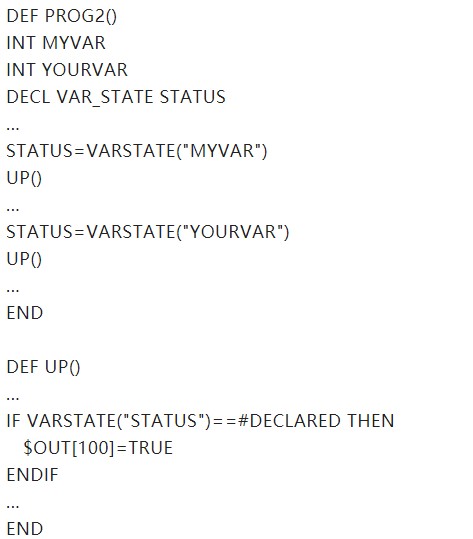
各种逻辑块中声明的变量或参数类型
临时变量在本地属于逻辑块,不产生静态内存区域,他们位于CPU的堆栈里。本块正在运行时,其值才被保留。....
西门子安全PLC:F- I/O DB介绍
在硬件与网络编辑器中组态 F-I/ O 时,将自动为每个 F-I/O 创建一个 F-I/O DB ....
实现两个CPU之间的PROFINET IO通信
PROFINET IO 通信不支持跨网段的实时通信,此外两个 PROFINET IO 控制器如果在其....
STEP7中SFC12功能块的应用
FB144 – FB_Docken 用于注册和注销 ProfiNet 设备。该块通常采用专用背景数据....
KUKA机器人将参数传递到子程序或函数中V1.28版
建议:始终将一个参数传递到相同数据类型的变量中。可以将参数传递到另一个数据类型中,但是有特定的限制。
涂胶设备原理及KUKA机器人控制分析+MAKRO
无论是DURR还是SCA的涂胶设备,他们在关机断电后都要进行自动寻参,这是因为他们的定量机电机使用了....
KUKA链接机器人程序
一个全局子程序是一个独立的机器人程序,可由另一个机器人程序调用。可根据具体要求对程序进行分支,即某一....
更换KUKA C2电柜的风扇V2023
柜冷却装置分为两条冷却循环回路。带有控制电子元件的内部区域通过一台热交换器进行冷却。在外部区域内,则....
KUKAC4机器人电机风扇故障,使得机器人没有好使能.V2
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。在箱柜的....
F-IO作为共享设备的使用入门
首先打开TIA PORTAL 软件,添加两个 C PU,分别设置 IP 地址,将这两个 C PU的以....
F-IO作为共享设备的使用入门
首先打开TIA PORTAL 软件,添加两个 C PU,分别设置 IP 地址,将这两个 C PU的以....
KUKA机器人电伺服焊钳力的建立过程V2.28
2: SERVOZANGE 1 Schweissen Programmnummer= 99 Punk....
KUAK机器人更换手轴A4-A5-A6A的几个关键点V2.27
将连接轴装到轴 4 和轴 5 的电机上 (轴向固定),事先给轴连接件涂上少许 Microlube G....
对齐X型气动焊钳上的扁平电极臂及更换极臂.
第 3 步:将带焊钳的机器人移至一个安全的维护位置。或者分离机器人焊钳与机器人,并将机器人焊钳定位至....
标准CPU与S7-1500R/H冗余系统是如何进行S7通信的?
S7-1500R/H 冗余系统的基本通信功能与 S7-1500 标准系统的大致相同,但在具体使用时有....





 工商网监
工商网监