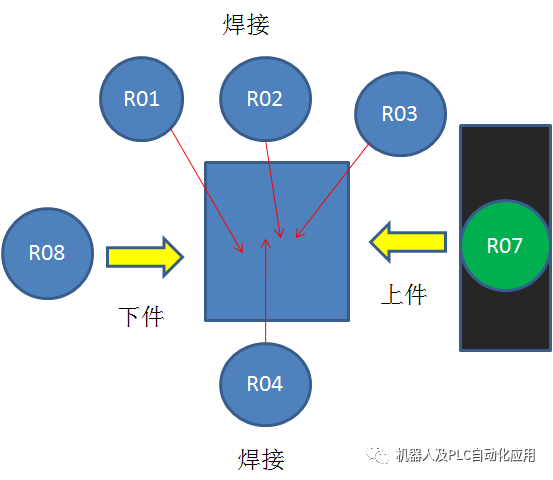
所有夹具和机器人的释放安全信号是A/E80-57,通过PLC顺序块控制机器人工作,如上件,焊接,下件....
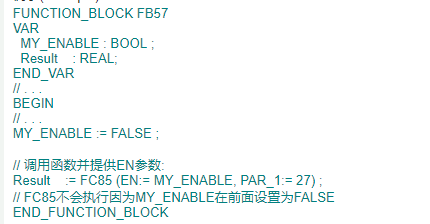
每一个功能块和每一个函数都有隐式定义的输入参数EN。EN是BOOL数据类型,且被贮存在临时块数据区域....
取代绝对地址,能够用一个常量、一个变量或一个算术表达式来指定一个索引。

大众标准中适用的力矩模式,重要是用来对机器人在移动过程中的力矩监控,减少机器人碰撞时发生损坏。
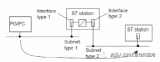
“S7 路由”是在西门子 S7 产品所组成的网络中,跨越两个以上网段进行网络访问。对于大多数可编程逻....
BASE坐标用来确定机器人空间上的坐标点,而TOOL则用来确定机器人以什么样的姿态去这个轨迹点。

通过各种指令中的 EN/ENO 机制,可以检测运行错误,并避免程序崩溃。 默认情况下,新插入的 EN....

CONTIUNE语句 CONTIUNE语句用来终止循环语句(FOR, WHILE或REPEAT)的当....

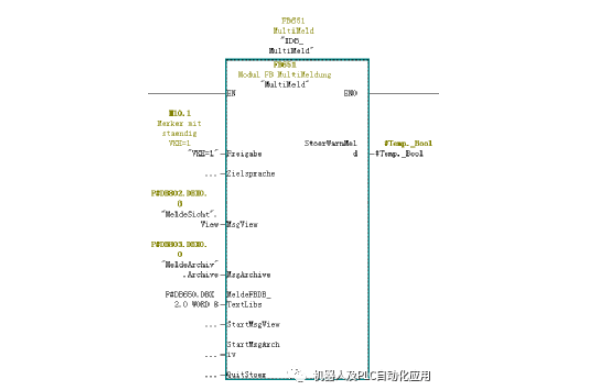
FB651 用于 多语言转换 用于在三种语言之间切换消息视图(数据库视图)和消息归档(数据库归档)中....
FB464 FB_Rolltor K100是启动卷帘门的前提条件 小黄点是互锁条件 MCC卷帘门控制....
也能够用一外索引来存取CPU的内存区域。与绝对地址比较,此方式的优点是能够用变量索引动态寻址。例如,....

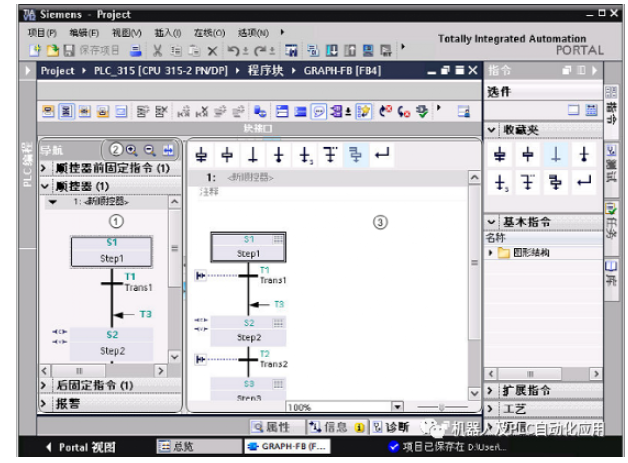
GRAPH 的编程窗口: 编程窗口是可供创建 GRAPH 程序的区域。除了实际工作区外,它还包含方便....
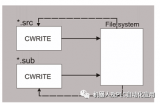
DEF EthernetKRL()文件机器人程序中的设置: EKI_Check(Ret:IN,Typ....
我最近看中了一款CPU,结果被价格劝退。 想提前练练手速,等有活动了再冲。 结果被来我家玩的....
当一个值被指定,变量的当前值被通过表达式指定的新的值代替。此表达式也能够包含函数标识符,其被语句激活....

Stream支持可靠、双向、基于连接的字节流,而不重复数据,也不保留边界。 此类型的 Socket ....

制造和工艺技术领域中的许多应用程序都具有顺序结构。您是否有必须在顺序处理步骤中执行的顺序处理?通过G....

当胶枪打开时,涂胶控制器开始接收机器人发出的模拟量,并根据模拟量值得大小控制定量机输出胶量进行改变.
在用户程序中创建数据块 (DB) 以存储代码块的数据。用户程序中的所有程序块都可访问全局 DB 中的....

设置访问等级和密码后,需输入密码才能访问功能和存储区。将在 CPU 的对象属性中指定各种访问级别及其....

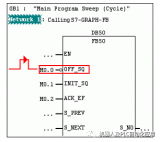
问题:如何在第一个OB1 周期中或第一次调用S7-GRAPH FB 时关闭顺控器? 解答:通过参数O....
工具钳的设置: 1输入钳号。 最多可能有32个钳。 2选择喷枪类型。 可以选择以下喷枪类型: 静态....
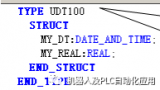
使用多重背景 S7-SCL程序中可以使用多重背景,下面的程序列出了正确格式,声明完成后,在程序中即可....

$ err 具有有关当前程序信息的结构 该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可....
ANY是一种用于传递指针的形参数据类型,可视为POINTE R 类型的扩展,较POINTER 类型为....

调用一个系统功能 (SFC24):当调用系统功能 SFC 24 “TEST_DB”(测试数据块) ....

AT指令是S7-SCL中特有的一个指令,初学者可能会忽略此指令,或者对其理解不够深刻。AT指令在S7....
调用一个系统功能 (SFC24):当调用系统功能 SFC 24 “TEST_DB”(测试数据块) ....

创建GRAPH块的方式与创建LAD / FUP / SCL / AWL / STL的方式完全相同。G....

与过程映像输入相关的诊断信息与用户数据同步传输。评估通道值状态时,请在 STEP 7 的 I/....






 工商网监
工商网监