S7-PLCSIM 和一个“真实的”自动化控制系统有哪些不同?
与真实的 CPU 一样,仿真软件可以改变 CPU 的操作模式(RUN, RUN-P 和 STOP)。....
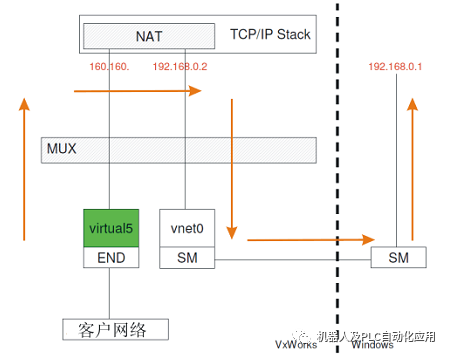
KUKA机器人KLI网络分析-KLIconfig.XML
利用 RDP (远程桌面协议),可从某一工位远程访问一台已网络连接的电脑。屏幕内容将通过一个渐隐窗口....
比较离线CPU与在线CPU
单击某对象的“操作”(Action) 列,在删除对象、不执行任何操作或将该对象下载到设备这三项中进行....
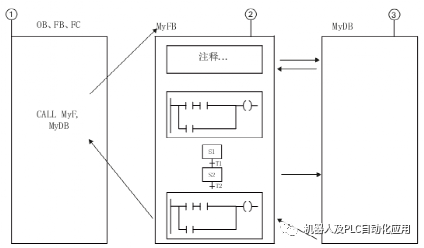
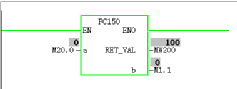
通过各种指令中的EN/ENO机制,可以检测运行错误
为该块互连了 EN/ENO 机制。如果执行期间没有任何错误,则 ENO 使能输出的信号状态将为“1”....
新一代S7-1200的常用现场总线PROFINET
使用设备配置的“网络视图”(Network view) 在项目中的各个设备之间创建网络连接。创建网络....
PLC快速接通“优先化启动”
即使不使用“优先启动”功能,以上措施也可加速 IO 设备的启动过程。但如果将“优先启动”功能与以....

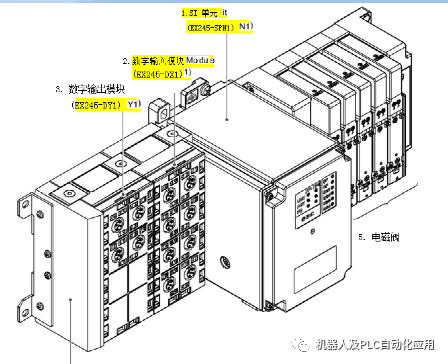
了解现场总线系统EtherNet/IP模块(EIP)
Ethernet/IP 实质上就是以太网 TCP/IP 针对工业用途的扩展版。Ethernet/IP....

MP277面板端的设置
在弹出的Ethernet Settings中,进入IP Address选项卡,选择Specify a....
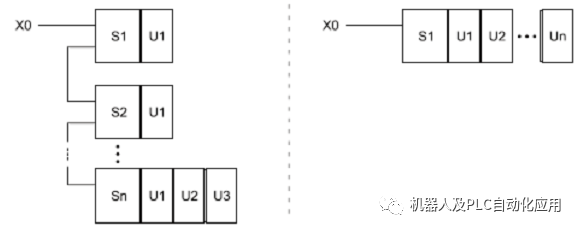
如何暂停GRAPH程序块
Graph程序在运行过程中,某些情况下需要将Sequence暂停去解决问题,当问题解决后,需要接着当....
1500之读取组态功能
如果 CPU 和集中存在的模块已组态,并且需要在新项目中加载当前的组态和参数,则建议使用“上传设备作....
快换的Profinet对接使用方式
同一个设备可以在不同的机器人上交替运行。为此必须使用其他的 IOCTL 功能进行解耦和耦合。如果一个....
编程窗口是可供创建GRAPH程序的区域
通过该类别启用条件,可为 ProDiag 函数块及其包含的各个类别定义一个启用条件(全局布尔型变量)....
在线为PROFINET IO设备分配名称
在“设备和网络”(Devices & networks) 编辑器中,右键单击所需的 PROFINET....
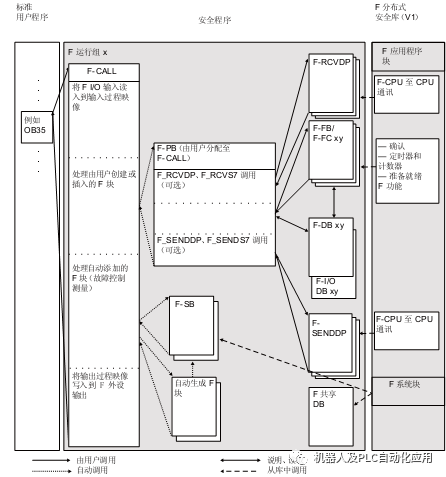
STEP7 V16安全管理编辑器
如果存在在线连接并激活了安全模式操作,则可以通过“ 禁用安全模式”(Disable safety m....
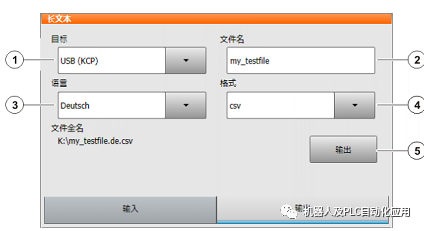
FB651用于多语言转换
用于在三种语言之间切换消息视图(数据库视图)和消息归档(数据库归档)中的消息文本。在数据库视图和数据....
KUKA机器人固定工具的测量
用户将工具的碰撞方向 告知机器人控制系统。 该碰撞方向默认为 X 轴。其他轴的取向将由系统确定,用户....
显示顺序块到第几步
在自动模式下,输出参数“S_NO”(数据类型“INT”)表示GRAPH FB在的当前激活步号。此外,....
FB412- 在VASS 标准中对大气缸的控制解析
FB 412 FB_Ventil_VEP 采用该块,可对 VEP 气缸、VEP 旋转装置 或 VE....






 工商网监
工商网监