西门子S1200-用简单指令创建复杂等式
1.使用简单指令创建复杂等式 在 Basic 指令树中,展开“数学函数”(Math function....
PLC1500介质冗余协议
介质冗余协议 (MRP) 说明 介质冗余协议 (MRP) “MRP”进程采用 IEC 62....
关于SCA涂胶定量机的填充超时的几种论述
1.SCA填充时间长的原因: 设备介绍: 原理图: 控制器 / 功能: SCA 控制器通过连接器....
机器人控制系统工具坐标的特点及用途
工具坐标的特点及用途 机器人控制系统通过测量工具 (工具坐标系)识别工具顶尖 ( TCP - To....
PLC安全门两区域间光电-故障控制改进
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号....
PROFIBUS,PROFINET,Ethernet三者的区别
PROFINET 是一种新的以太网通讯系统,是由西门子公司和Profibus用户协会开发。 PROF....
同步/ 异步指令之间的不同之处
而异步指令,则情况有所不同:异步指令调用完成时,异步指令的执行不一定完成。这也就意味着,异步指令的执....

PLC1500地址分配
STEP 7 将自动指定一个硬件标识符(HW 标识符),用于标识和寻址模块和子模块。例如,在诊断....
SMC-PNEX 245模块故障分析
在机器人没有给上”使能”US2时阀导的输入模块无故障,显示正常。给上使能后输入模块的输入点都无电,相....
IBS-BG4程序的项目结构
一个项目可能包含多个PLC / PC。 一个PLC / PC系统中可以安装多个控制器板。 一个控制器....


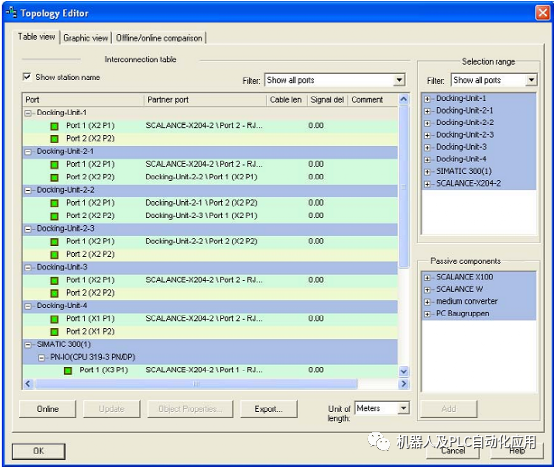
博途插入并组态PLC
图形区域显示与网络相关的设备、网络、连接和关系。 在图形区域中,可以插入硬件目录 (7) 中的设....
KUKA C1-C2机器人工作原理
所有工作程序都能够在降低的速度条件下以手动的,测试运行方式来完成动作.工作程序只有在按住”START....
一个SMC-SI单元控制失误
现场的SMC-SI-EX245单元使用10个阀导,首先是先导阀压力故障,将先导阀压力反馈短接后变成中....
点焊机器人是大众标准中最常使用的基准工艺控制
对于带有补偿系统的焊枪,补偿值以二进制形式传输到焊枪,并且必须在每个焊接点进行编程。夹紧补偿的值应这....


借助工业以太网进行电源管理
借助CapCtrl.xml 进行的工业以太网接口配置不是PROFIenergy的函数并且必须分开考虑....
KUKA的PROFINET之WakeOnLAN
要实现 WOL 网络唤醒 (远程开机/关机),首先需要开启电脑/设备的 WOL 功能,后面我们会有怎....

S7-1200的SIMATIC存储卡
如果用作程序卡,则可以在存储卡上装载用户程序。这种情况下,存储卡将替代设备的内部装载存储器,且内部装....
KUKAC4机器人使用的Dual NIC网卡
每块网卡都拥有全球独一无二的识别码,即 MAC 地址 MAC 地址。该地址可从网卡上直接读取,也可利....
解决滚床报完成信号没清故障问题
通过跟踪检测,发现机器人用总信号时,当机器人在铣削时,一旦连续工作,进车时,就会出机器人的总完成信号....





 工商网监
工商网监