西门子自动化标准有以下这些通用功能 你知道哪个?
下面开始介绍西门子汽车厂工业自动化的几种基础功能!(不光是VASS标准,特斯拉的SICAR也同样).....
介质冗余协议(MRP)说明
在拓扑视图中,通过端口互连构建一个环网。首先将设备互连到一个线形拓扑结构中。连接线形拓扑结构中最后一....

交换机故障竟导致整个网络连接不上
模块/子模块触发了诊断中断,指示诊断状态已变化。存在故障或维护要求,或两者均有。可在事件详细信息中看....
STEP7使用-编辑Ethernet节点究竟有哪些前提呢?
如果此设备是作为PROFINET IO设备运行的,还可以在此分配PROFINET设备名称。但是请记住....
S7_1200要开放式用户通信TCP-IP了?
开放式用户通信 CPU 的集成 PROFINET 端口支持多种以太网网络上的通信标准: ....
要启动 HMI 画面的仿真需要哪些步骤?
使用运行系统仿真器仿真独立于程序的已连接 PLC 变量的过程值。 可使用运行系统仿真器表选择 P....
KUKA机器人标准程序练习堆垛和卸垛
堆垛和卸垛练习: PTP fa2 Vel=100 % PDAT3 Tool[1]:1 Base[10....
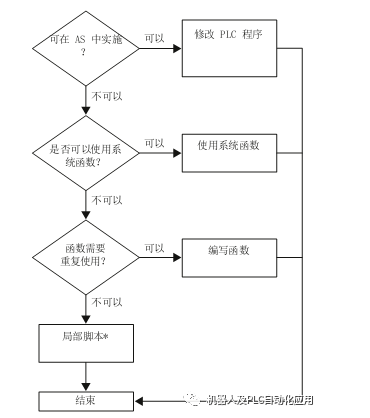
KUKAVASS06标准下的MAKRO39到底有什么用法?
其他〜选择其他(无虚拟轴)P5 = 1号至4号钳子〜1号至4号钳子的选择无〜选择无钳子否(用于夹持器....
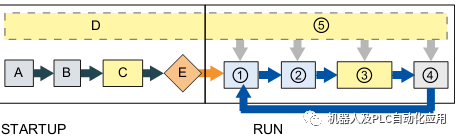
图解说明VW_Basic_8_3软件功能
KUKA机器人使用的标准VW_Basic_8_3_20 LAD软件.
VW_Basic_8_3....
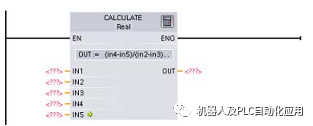
SCL编程示例!满满的干货
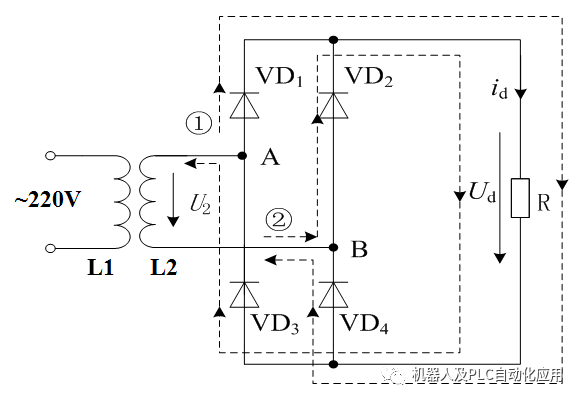
如果光电屏蔽“PEB1”的信号状态为“1”同时光电屏蔽“PEB2”的信号状态为“0”,则传送带上的包....
简述S7-1200-Modbus RTU 和 Modbus TCP 通信概
要确认程序中 Modbus TCP 指令的版本,必须检查项目树的属性而不是程序编辑器中显示的框的属性....
KUKA-C4机器人如何导出/导入长文本
如果已经分配输入 / 输出端、标志位或名称,则可以将这些名称 (所谓的 “长文本 ”)导出到一个文件....
KUKA 8.3系统中MAKRO40 POT空运转的用法
计算空运转时P值得赋值PAR2就是你要给空运转时设备的运行虚拟时间
西门子PLC F-IO访问
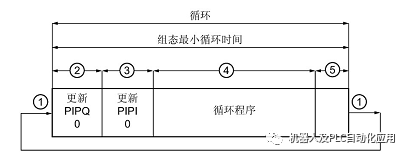
F- I/O 的输入过程映像在 F 运行组开始时进行更新。F- I/O 的输出过程映像在 F ....
编辑Ethernet节点
如果此设备是作为PROFINET IO设备运行的,还可以在此分配PROFINET设备名称。但是请记住....
使用FB65但RFID与PC的连接DB用法有一定的区别
两个通信伙伴都调用FB 65 "TCON"来设置和建立通信连接。在这些参数中,您要指定哪个伙伴是主动....
控制系统现场总线驱动程序中的故障
如果控制系统确定通过现场总线驱动程序引起了一个故障,将在SmartPAD 的信息窗口中给出一条信息。....
在用户程序中创建数据块 (DB) 以存储代码块的数据
可通过在程序编辑器中右键单击相关指令或 FB,或者通过选择“选项”(Options) 菜单中的“块调....
用户存储器(RAM) 中的间隔
在删除和重新加载块后,可能会在用户存储器(装入和工作存储器)中产生间隔,从而减少可使用的存储器区域。....
F-CPU的用户程序:PROFISAFE实用浅谈
创建F-CALL :使用编程语言“F-CALL”,用户可以完成运行组的“F-CALL”的插入操....





 工商网监
工商网监