制作一条KUKA-C4机器人的提示框!
用函数 Set_KrlDlg( ) 可生成一则对话信息。 这意味着,该信息提示被传递到信息缓存器中....
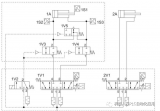
伺服焊钳的滞后故障分析
允许的滞后误差极限可通过变量”MAX _SF ”(VW_USR_S.dat)配置。预先设定的滞后误差....
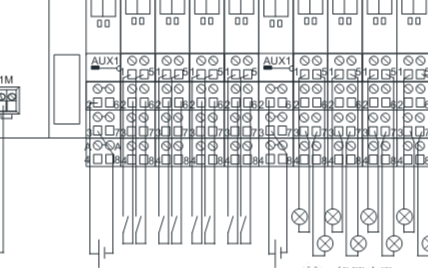
快换头故障维修的难度
在标准版本中如果“解锁”信号已设定,而安全开关未激活,此状态将被识别为故障, LED H5亮红灯,经....

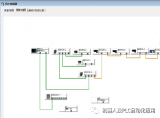

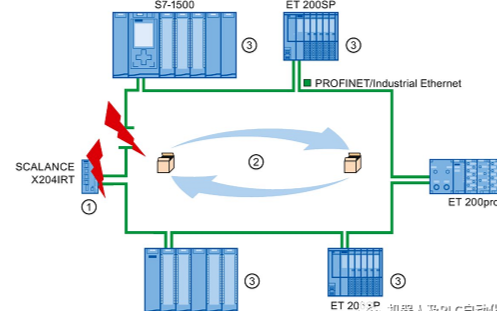
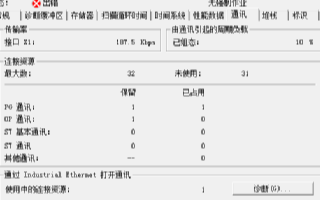
SCALANCE X-200 IRT PRO网管型
如果您不想使用 PROFINET 功能运行工业以太网交换机 X-200,则不得为设备分配PNI....


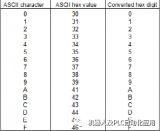
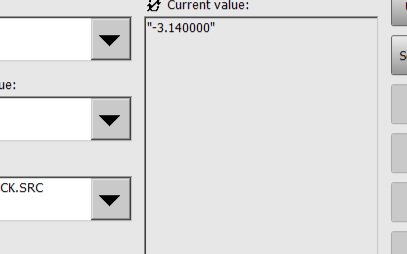
读取KUKAC4.8.3系统机器人轴参数
读取KUKAC4.8.3系统机器人轴参数!用于测量电极的磨损量. GLOBAL DEF SGL_....
Python能做什么?自学Python获得人生的第一桶金经验分享
Python能做什么?Python是什么玩意?有这么神?偷偷搜了一下,我却吓了一跳。早就有一大批人,....




S7-1500如何设置启动特性
设置启动特性 要设置启动特性,请按以下步骤操作: 1. 在 STEP 7 硬件和网络编辑器的设....
CPU1511总是爱烧CPU
CPU1511 卸下和安装前面板时用到的坚固件 ① 显示 CPU 当前操作模式和诊断状态的 LED....
KUKA CELL()程序的分析解读
程序结构: DEF CELL() AUTOMATIK EXTERN Folgenummerbere....
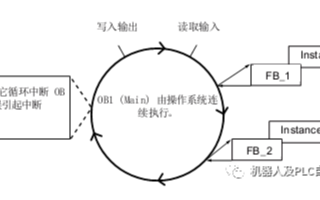
西门子PLC系统功能块和系统功能
系统功能块(SFB )和系统功能(SFC ) 已经编好程序块 用户不需要每个功能都自己编程。S7 C....






 工商网监
工商网监