对于初学来说,容易 在ENO的使用上出错误,由于不清楚ENO来龙去脉,经常认为只要调用FC是无条件的....

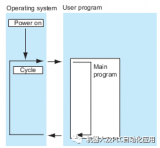
每个CPU都带有集成的操作系统,组织与特定控制任务无关的所有 CPU功能和顺序。
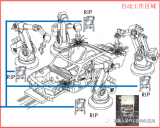
控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出像问题的概率是很低的!....
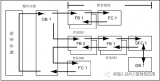
该指令可用于调用子程序并将子程序调用链接到条件(布尔操作数)。如果需要,可以链接多个操作数(最多11....

上升(下降)沿不工作也是一种常见的错误,尽管手册中“P”或“N”指令允许的数据类型为:I,Q,M ,....

工业以太网在进行数据交换时使用它自己的协议,该协议在访问模块时不使用 TCP/IP 协议,而使用正确....

如果在 SFC12 中没有需要激活或去活的任务,则读出设备的当前状态。若某个设备被去活,则将其输入....
程序位于文件夹 R1Program 中。默认情况下,它不含指令。在需要时,用户可以在 CollDet....

HMI 系统相当于用户和过程之间的接口。 过程操作主要由 PLC 控制。 用户可以使用 HMI....

BCO运行后设置此输出。因此,机器人控制器会与上级控制器通信,使机器人位于编程路径上,只有当机器人离....
控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出像问题的概率是很低的!....
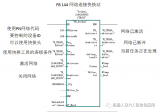
如果在初始化阶段中出现故障,则中间的轴调节器 LED 闪烁。其他 LED 指示灯熄灭。轴调节器的红色....
对于一代精简面板KTP600 Basic color PN:在Channel1中选择Enable C....
在 SIMATIC S7 上运行 RF180C 时,为用户提供了方便的函数块 (FB 45/FB 5....
此时会启动运行系统仿真。 启动仿真后,“运行系统仿真器”(RT Simulator) 窗口中将显示....

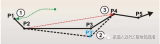
在当前样条组内的任意一个段点选择语句均可不受限制。这被视为针对当前运动的语句选择,因为机器人控制系统....

扫描循环时间是操作系统运行循环程序和中断循环的所有程序部分(例如,执行其它组织块)以及系统操作(如,....
如果用作程序卡,则可以在存储卡上装载用户程序。这种情况下,存储卡将替代设备的内部装载存储器,且内部装....
对于显示屏较小的 CPU,经常会超出显示屏可用宽度。如果将光标放置在显示屏的相关值处并按下左箭头键,....
当调用功能“硬件诊断”后,诊断符号将会显示在在线视图以及快速视图(默认设置)或诊断视图的项目窗口中。....
指定机械手控制器是否为Office PC。通常不是这种情况,即不要激活复选框。(Office PC ....
机器人通过信号“关闭喷枪”或“开始学习示教位置”激活均衡器。对于每个焊接点,机器人会发送适当的二进制....
WorkVisual 硬件驱动程序汇总在一个 DTM 目录中。除了刚刚介绍过的 GSDML 文件外,....

为了确保安全的PROFINET通信,必须根据下表配置PROFINET组件的更新时间。 请注意,所有设....

MakroTrigger宏包含8个预定义的触发器,尚未包含任何语句。用户可以根据特定要求编写ram语....

FB41用于通过使用连续的变量输出在SIMATIC S7控制系统中实现技术过程控制。除了设定点操作和....

如果控制系统确定通过现场总线驱动程序引起了一个故障,将在SmartPAD 的信息窗口中给出一条信息。....

对话的返回值:对话的“句柄 (handle)”。用该“句柄”可检查是否成功生成了对话。同时,“ 句柄....

如果编译的运行无法自动去除所有块不一致性,则相应对象将在输出窗口中以错误消息标记。将鼠标移至相关的错....

所以在循环程序处理过程中,CPU的过程信号映象是一致的。CPU并不直接访问I/O 模板上的输入(I ....





 工商网监
工商网监