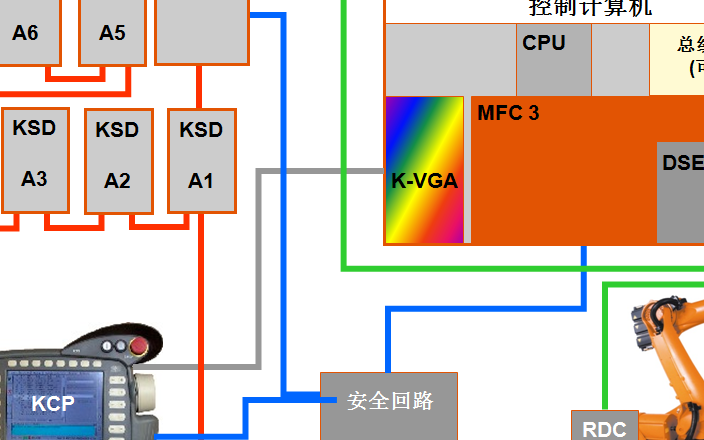
KUKA C4机器人的轨迹BASE与TOOL坐标
在工业机器人的操作、编程和调试时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系: ROBR....
机器人及PLC自动化应用
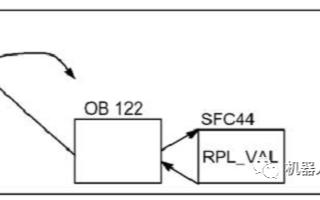
PROFINET IO 中的诊断 PROFINET IO 中的诊断的基本原理: 基本概念 同时发....
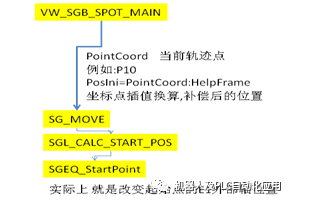
大众标准里机器人程序中P值的设置被存在了哪里
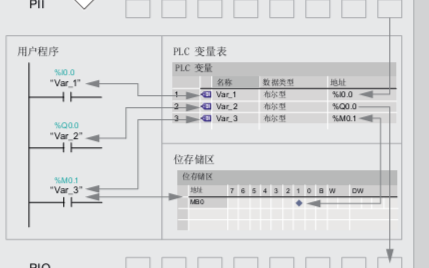
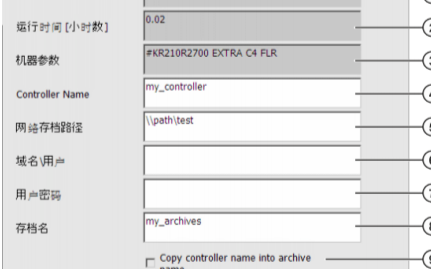
在大众标准机器人程序中我们很多时候都要设置P,或者使用P,那它被存到了那里呢? 例如: ;FO....
CPU 317-2 PNDP组态PROFINET接口
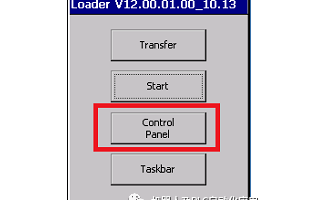
第 1 步:设置 PG/PC 接口 1. 选择“开始 SIMATIC STEP 7 自定义 PG/....
KUKA-C4机器人如何导出/导入长文本
如果已经分配输入 / 输出端、标志位或名称,则可以将这些名称 (所谓的 “长文本 ”)导出到一个....

KUKAC2机器人程序备份如何操作
最近出了C4机器人我又捡起了C2机器人的维修工作,由于本身对C2的接触时间不久就开始学习了C4机器人....
史陶比尔换枪盘-MPS常见故障及处理办法
1.锁紧传感器无信号 现象: 1,E540报错 2,机器人无法检测锁紧位置传感器(locked传感器....
大众VASS05机器人焊接程序标准中焊接与服务有什么区别
Tech_ EZSP Zange = Nr1与Tech_ EZSP Zange = Nr1 Serv....

Python也太强大了吧
“Python除了不能帮你生孩子,什么都能做!” Python厉害的事真的太多太多了,各种千奇百....
SICK光电硬件拆卸
SICK光电硬件大拆卸 近日在现场遇到SICK光电报E3故障,SICK接口模块故障.我们将通讯模....
博途VASS06的CPU设置要求
VASS06版使用的CPU为: CPU 1517F CPU: 为了实现 VASS 标准中的预期功能范....

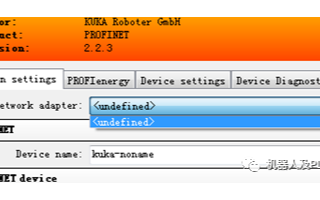
KUKAC4-PN网络模块如何修复
昨天一个8入8出的机器人1轴模块出现指示灯不亮的地问题,机器人提示:A1轴模块掉网. 对它进行拆解检....
PLC自动工位所使用的条形光栅的解法与调试
PLC自动工位所使用的条形光栅是我们经常使用的一种人工上件的安全控制设备. 人员进入传输货架卸垛....
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入门教程
基于S7-300400 CPU集成PN接口的Modbus TCP在TIA Portal的使用入门. ....
基于TIA Portal下的TCP通讯的方法详解
基于TIA Portal下的TCP通讯的方法 PLC与PLC通过TCP连接控制!对于现场经费需要优化....
如何将 PROFINET IO 系统的用户数据交换组态 IRT 通讯?
组态 PROFINET IO 系统的 IRT 通讯 通过 域管理 (Domain managemen....
使用FB65但RFID与PC的连接DB用法的区别
同样是使用使用FB65但RFID与PC的连接DB用法有一定的区别: 首先说一下什么是FB65: 通过....
西门子PLC如何对F系统进行编程
F-CPU 中的用户程序通常由标准用户程序和安全程序组成。标准用户程序是在 STEP 7 中使用标....





 工商网监
工商网监