初始算法选择和超参数优化是我个人不喜欢做的活动。如果你像我一样,那么也许你会喜欢自动机器学习(Aut....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-15 11:11
•2627次阅读
没办法,event camera 直译过来就是事件相机,虽然我觉得这个称呼不太直接,或许翻译为“微动....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-15 10:58
•3691次阅读
循环神经网络(Recurrent Neural Network,RNN)是一种用于处理序列数据的神经....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-15 10:44
•1897次阅读
另外,图像目标框往往比真实目标大一些,目标边界框内投影点云可能不属于真实目标(比如可能属于背景,或附....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-15 10:39
•12974次阅读
三维点云数据用于表征目标表面的海量点集合,但是各个离散点之间并没有拓扑关系,一般通过建立点云的空间索....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-14 10:57
•7557次阅读
深度相机也具备普通相机的一些不足,容易受视差影响:包括黑色物体(特征点少)、透明物体(光的穿透)、光....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-11 13:38
•13572次阅读
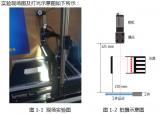
通过打低角度环光源可以强调边缘,凸显与背景的高度对比,暂定视野100*70,单个像素精度为0.05m....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-11 11:24
•1574次阅读
缩放算法,尤其是放大算法,将原先没有的像素,通过一定的算法计算出来。这些算法常用的有最近邻域算法,双....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-09 16:51
•2245次阅读
ISP(Image Signal Processor),即图像处理,主要作用是对前端图像传感器输出的....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 03-09 16:11
•7945次阅读
在播放视频时,常遇到视频尺寸与画布尺寸不一致的情况。为了让视频按比例填充画布,需要对视频中的每一....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-09 15:39
•1891次阅读
随着现代科技的高速发展,机器视觉技术在无人机、安防监控、工业检测、ADAS高级驾驶辅助系统、医疗诊断....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-09 15:32
•3126次阅读

照片、视频中的人脸有时也能骗过一些不成熟的人脸识别系统,让人们对人脸解锁的安全性产生很大怀疑。在这篇....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-05 15:54
•2539次阅读
本文为作者在从事Slam相关工作中对这几年遇到以及改进过相关VIO算法内容总结。 1.背景介绍 一个....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-03 09:45
•2457次阅读

本文介绍算法的源码在github上给出 https://github.com/TimChinenov....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-02 10:02
•1252次阅读
这份终极指南从简单到复杂,一步步教你清除模型中所有的GP模型,直到你可以完成的大多数PITA....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-02 09:57
•2348次阅读
摘要: 在中国制造2025的大背景下,随着智能制造与装备、高新精密加工及工业物联网技术的发展,对非接....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 11-01 11:06
•5588次阅读
CMOS图像传感器的工作原理:每一个 CMOS 像素都包括感光二极管(Photodiode)、浮动式....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-19 16:49
•9658次阅读
当用均值滤波器降低图像噪声的时候,会带来图像模糊的副作用。我们当然希望看到的是清晰图像。那么,清晰图....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-19 16:22
•3112次阅读
白平衡,字面上的理解是白色的平衡,白平衡是描述红、绿、蓝三基色混合生成后白色精确度的一项指标,是一个....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-19 16:14
•6858次阅读
介绍 模板匹配是一个图像处理问题,当其姿态(X,Y,θ)未知时,使用另一张搜索图像中的模板图像找到对....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 15:20
•3237次阅读

转自 | 小白学视觉 OpenCV Halcon 开发语言 C++、C#(emgu)、Pytho....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 15:11
•16485次阅读
SLAM (simultaneous localization and mapping),也称为CM....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 10:38
•2545次阅读
来源 | 中科蓝海 检测需求 1、识别布料颜色,并且进行排序(由深到浅); 2、检测速度:30m/m....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 09:38
•2808次阅读
转自 | Python联盟 1.视频读取 首先把视频读取进来,因为我测试的视频是4k的所以我用r....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 09:32
•4191次阅读
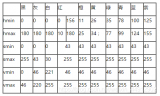
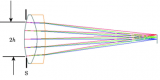
来源 | 小小光081. 光阑与光瞳 任何实际光学系统中都有一个孔径光阑,简称光阑(Stop),它限....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-13 09:27
•8705次阅读
来源 | 光电资讯 激光雷达是一种通过发射激光束来检测目标位置,在进行各种处理后获得目标信息的雷达装....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 10-08 09:44
•6648次阅读

引言 如何做AI视觉应用的嵌入式部署分为硬件选型,软件框架和优化的选择,模型算法的设计三大板块。 A....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 09-23 16:38
•2254次阅读
在前不久发布的OpenCV4.5中更新了很多新特性: 从4.5版本开始,OpenCV将正式使用Apa....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 09-22 14:16
•5109次阅读

来源丨https://blog.csdn.net/MrSpart/article/details/1....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 09-14 09:32
•1955次阅读
点云的获取方式有多种,比如三维成像传感器、Lidar激光探测与测量、逆向工程等。.. 对于寻常百姓家....
![的头像]() 新机器视觉 发表于
新机器视觉 发表于 09-12 14:55
•2160次阅读





 工商网监
工商网监