ProDiag FB是用ProDiag编程语言创建的,例如使用“添加新块”对话框。

S7-200 SMART CPU 固件版本 V2.0 及其以上,本体集成的 PROFINET 通信接....

用SFC12 "D_ACT_DP"激活和取消激活DP从站/PROFINETIO设备
在FB144中....

Minimum , FB只包括SQ_ INIT 启动参数,如果用户的程序仅仅会运行在自动模式,并且不....

IF($OUT[PF0]AND VW_CALL_CELL AND ( NOT $PRO_MOVE) ....

GLOBALINTERRUPTDECL 8 WHEN $softplcbool[5] DO SZIn....

为了能够在 PLCSIM 和 PLCSIM Advanced 中仿真项目,必须在“属性”选项卡....

将编程设备/PC 连接至相关 PROFINET 设备所在的同一网络。PD/PC 的接口必须设置....

铆钉通过送料系统的输送的。当输送带上传感器没有感应到铆钉时,输送马达被激活,在储料箱内的铆钉进入滑槽....

小气缸:小气缸的作为辅助气缸,可以带动枪头部分动作。如果拧紧夹持器中有拧紧螺栓,返回时会将螺栓吐出。....

FB900“ARG”用于构建安全程序。在此块中,将调用各个启动电路,急停驱动,负载电压以及 PRO....

在子程序的最后一行前使用RESUME语句停止提前运行是重要的。只有这样才可能确保当RESUME语句被....

模块/子模块触发了诊断中断,指示诊断状态已变化。存在故障或维护要求,或两者均有。可在事件详细信息中看....
结束测量信号,这个测量信号是机器人给杜尔系统的,对涂胶量进行测量。模拟出一个完整的信号来完成机器人和....

对比功能块,函数没有任何他们保存参数值的内存。在函数激活时,本地数据只中临时地贮存。由于这个原因,当....

焊接开始,焊枪伺服电机驱动,焊丝与板材电弧引燃,焊丝融化融滴滴进熔池,当数字化的控制监测到一个短路信....

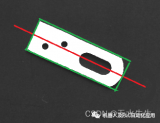
运算符orientation_region 计算区域的方向。运算符基于 elliptic_axis。....
组织块CYCLE的任务(Tasks of the CYCLE OB)
选择OB1是因为它被循调用。....
*缩小图像的域,取image与rectangle的交集,句柄ImageReduced,诣在从原图上扣....
此外,还可以在GenParamName和GenParamValue中调整一些通用参数。特别是,可以设....

使用操作符 open_framegrabber 打开与图像采集设备的连接时,主要参数是相应 HALC....

用操作符 open_framegrabber,您可以打开与图像采集设备的连接。这种连接由四个参数描述....

在此计时器中,EA已经为项目中配置的第一个计时器预设,不再需要调整。如果在一个项目中实施了多个计时器....

使用 TRIGGER WHEN DISTANCE 语句并以轨迹为参照的切换函数编程
从 TIA Portal V14 起,可通过 ProDiag功能对设备或工厂进行监控,并在故障时采取....
与S7-300/400一样,S7-1500和S7-1200都有存储区M区,另外S-1500还有存储区....
结构类型的定义 (=STRUC 数据类型)。在此将多个数据类型汇总为一个新的数据类型。
使用 TRIGGER WHEN DISTANCE 语句并以轨迹为参照的切换函数编程
SD卡的读写,类似于普通SD卡,但是不能用windows格式化
MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的MODBUS系列讯协议的派生产品,....





 工商网监
工商网监