WARTE BIS E2200 $LOOP_MSG[]="E2200" $....

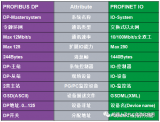
PROFINET IO与PROFIBUS DP的基本参数比较 总体来说,PROFINET IO的性能....
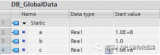
例如,数据类型 REAL 在程序中以 6 位小数的精度进行指定和计算。在计算浮点数(REAL和 LR....
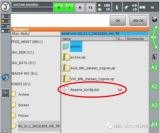
调试系统文件 在进行更改之前,强烈建议对机器人进行备份。 更改$config.dat的要求是注册为“....
该功能块库可以用于S7-300/400单站系统或ET200S带CPU的接口模块通过CPU的集成PN口....

在首次接通连有机器人本体运动机构的 KR C4 时务必考虑以下步骤。 这些步骤不能取代首次投入运行的....

1.首次开机启动,电池的电源线(X305)是没有接的,需要插上,X305. 检查机器人本体接线. 接....

1 全局数据包通信简介 对于PLC之间的数据交换,只关心数据的发送区和接收区,全局数据包的通信方式是....

其中包含引用解释器的进程指针的数据. 变量包含接下来将在解释器中执行的块的数据。 根据特定的解释器,....

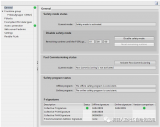
安全管理编辑器 在“常规”(General) 下,将显示以下信息: – 安全模式状态 –....
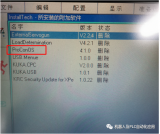
ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计. 概观 Pro....
S7-1200支持UDP单播和UDP广播,不支持UDP组播。

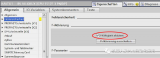
CPU的安全程序设置必须在“保护”选项卡和“F 参数”选项卡中进行。
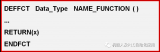
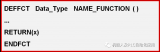
DEFFCT ...ENDFCT:定义函数 DEFFCT 数据类型 名称( ) RETURN 函数....
可以通过目录管理单独添加SGB选件包中未包括的目录元素。 必须添加目录元素“ VW_SGB”。 ....

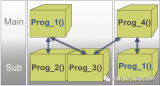
如果在子程序中满足了特定的条件,使用 RETURN 返回到主程序中。无法将子程序中的值传递给主程序。
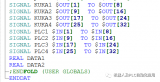
STRUC Iobus_Info_T CHAR name[256], drv_name[256], ....
![KUKA系统变量:$IOBUS_INFO[]读取是否出现总线故障](https://file1.elecfans.com/web2/M00/88/A5/wKgaomRt5W-AR4GmAAAYSRZEjrw798.png)
GET_NAME”指令用于读取 IO 设备或 DP 从站的名称。该名称将显示在网络视图和 IO 设备....

...KS_KUKA_DateienTechpaket8.2Basicxxxxxxxxxarchiv....

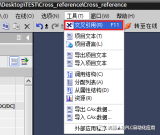
交叉引用列表提供项目中对象的使用概况。可以看到哪些对象相互依赖以及各对象所在的位置。
为了提高具有光纤或电气线形总线型拓扑结构的工业以太网的网络可用性,可以通过将终端设备连接在一起,将线....

借助模板创建程 Cell:现有的 Cell 程序,只能被替换或者在删除 Cell 程序后重新创建。 ....
$PROG_INFO[]将某些系统状态组合在一个结构中。 $PROG_INFO[ Interpret....
在几个语句分支中选择。 SWITCH 选择标准 CASE 标记 1 指令块 指令块 > 默认指....

$POS_ACT 当前笛卡尔机器人位置 E6POS结构类型的变量定义了TCP相对于BASE坐标系的设....

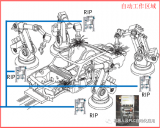
RIP的各元器件 1.控制RIP的USER程序在这里.正常情况下这个是大众统一的标准程序.我只能说出....
导出文件 如需与其他语言进行联合编程,可以在文件--->导出中导出所需要的相应语言。 导出的....

现场总线信号可在 WorkVisual 中进行编辑。例如可更改信号宽度,或调换字节顺序。 1. 在窗....

对于未初始化的变量或数组元素,会将随机值写入缓冲区。由于随机值可能会导致缓冲区接收器出现问题,因此建....
“ModuleStates”指令可用来读取 PROFINET IO 设备或 PROFIBUS DP ....




 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

