Fronius CMT是一种工作方式技术: 焊接开始,焊枪伺服电机驱动,焊丝与板材电弧引....

CIOCTL仅与外部对象相关。 CIOCTL可用于将任何数据传输到外部对象,例如, 配置数据以更改文....
ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计。ProConO....
POS_BACK可用于返回到中断的动作指令的起始位置$POS_BACK对应于用于近似窗口内的中断的窗....

表达式类型的整数必须给出计算器的最初和最后的值。表达式求一次循环开始的值。计时器被最初的值调整和增加....

过指令“GetSMCinfo”,可检索当前所插入 SIMATIC 存储卡的相关信息。通过参数“Mod....

带有机器人中断数据的结构 这些数据可以通过变量校正功能或通过主菜单中的诊断功能显示。 在robot和....

ProDiag FB是用ProDiag编程语言创建的,例如使用“添加新块”对话框。

使用了KUKA.OfficeSite,或者系统软件的映像正在办公电脑上运行。
你能用系统变量$ADVANCE定义先前控制器执行的中断如何动作。在指令关于外围( 例如输入/输出指令....
硬件数据类型:硬件数据类型由 CPU 提供。可用硬件数据类型的数目取决于 CPU。 根据硬件配置中设....

指令“DeviceStates”用于查询 IO 系统中所有模块的特定状态信息

硬件数据类型:硬件数据类型由 CPU 提供。可用硬件数据类型的数目取决于 CPU。

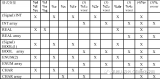
除ARRAY和ATRUCT数据类型和参数数据类型外的所有类型均作为输入值。所有参数化变量均应是同一类....
选择旋转方向后,驱动器以预期的爬行速度沿相应方向移动,直到取消选择。通过以下方式选择方向。

ProDiag FB是用ProDiag编程语言创建的,例如使用“添加新块”对话框。

预先确定的变量(INT$DATA_SER1orINT$DATA_SER2), 未被请求的数据到达后通....
如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则....
必须将其标定为其表示的工程单位的最小值和最大值。对于要转换为模拟量输出值的以工程单位表示的值,应首先....

在声明部分给该模拟输出端分配一个任意的名称,在该情况下为 GLUE。粘结剂量取决于当前的轨迹速度 (....

对精简面板进行备份有两种方式,一种是在用U盘连接面板,将数据备份至U盘(只有二代精简面板支持该方式备....

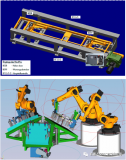
平移辊床使用的功能块有FB 453 FB_Elefant_AMX, FB 365 FB_SEW_AM....

X5520-STO安全点直接控制变频器的功率单元以及抱闸的控制单元,接通后使抱闸和电机可以控制。S1....
当型循环。一直重复指令块直到满足了特定条件的循环。如果不满足条件,则用 ENDWHILE 后的下一个....

“new” 值在控制器转换完成而且再次返回后被使用。这是在线修正和和其他程序修改的要素。如果你想总是....

不需要对CHANNEL语句进行编程。它已经为文件$CUSTOM.DAT中的所有外部模块预定义。不过,....

车身车间需要同时进行车身的进料和出料,例如在焊接线上,“Elefantentrab(穿梭模式)”。F....
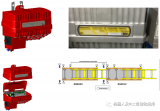
scapacsâ: Module, Teleskoparm (TA)(伸缩臂的高度变化是由内部导向杆....

机器人程序的结构是体现其使用价值的一个十分重要的因数。程序结构化越规范,程序就越易于理解、执行效果越....

“ =” 符号和最初的值以常量的形式跟随变量名。当声明默认的设置,你不能在声明语句中列出多个变量。一....






 工商网监
工商网监