KUKA电柜27V控制电源故障产生的原因及解决办法
低压电源件用于对下列组件进行供电:1 电机制动装置,2 外围设备,3 控制系统电脑,4 KSP's,....


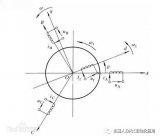
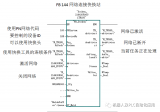
机器人激光钎焊的整体组成
偏振耦合—为进一步提高激光功率,可对激光束进行偏振耦合,类似于波长耦合,两个线性极化激光束可通过选用....
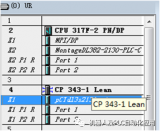

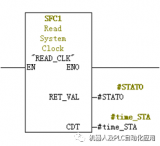
ProAgent和STEP 7工程工具为SIMATIC S7提供标准化的诊断方案
供有关故障位置和原因的精确信息,帮助操作人员完成故障查找。与 STEP 7 组态工具 S7-PDI....
机器人FOLGE程序如何被调用激活的!
WAITFOR SPS_FERTIG -中断预执行指令,等待SPS指令结束,SPS指令结束才能程序....
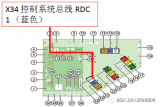
由C2机器人风扇故障联想到C2机器人的内部结构
ESC(Electronic Safety Circuit,电子安全回路)是一个数字电路, 用以控制....


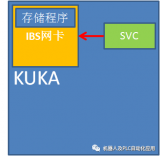
KUKA机器人的VXworks系统的使用
每一个任务都有自己的上下文。上下文保存在任务控制块中, 是任务转为运行状态时要查看的CPU的环境资源....
CASE:创建多路分支
如果表达式的值等于第一个常数()的值,则将执行紧跟在该常数后编写的指令()。程序将从 END_CAS....
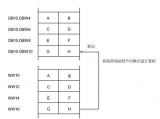
两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
因此我就想如果我想在KUKA 机器人初期调试工作过程中减少互锁区设置失误而碰撞的损失,我们可否给变量....






WorkVisual中的安全配置知识汇总
无法直接显示或编辑与安全相关的通讯参数。WorkVisual 中不同的操作对与安全相关的通讯参数产生....





 工商网监
工商网监