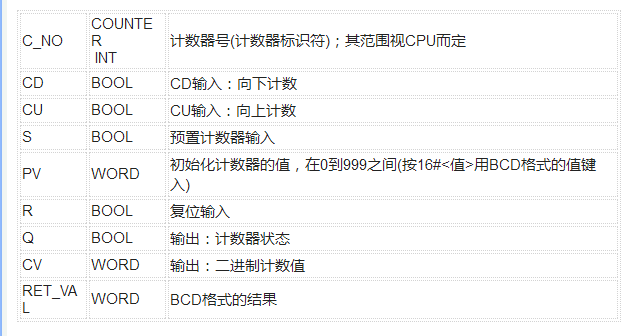
可使用“分配参数并加计数”指令递增计数器值。当 CU 参数的信号状态从“0”变为“1”(信号上升沿)....
WAITFOR SPS_FERTIG -中断预执行指令,等待SPS指令结束,SPS指令结束才能程序....
如果在定时器运行期间复位(R)输入从"0"变为"1",则定时器复位。当前时间和时间基准被设置为零。

并且已经获得下面的信号 : 热槽温度,控制柜内部温度,控制柜风扇温度,IC 电压。
RF180C 上最多可同时操作两个阅读器。 您可以将一条命令同时发给两个阅读器(在 SIMATIC ....
IO 控制器与 IO 设备之间的数据交换通过两条不同路径发送(环拓扑)。冗余管理器监视冗余介质上的传....
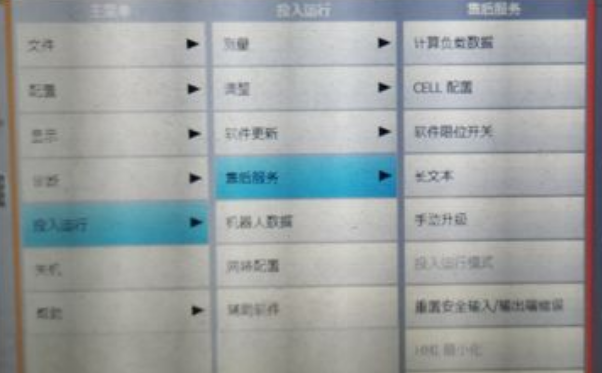
电源电压不正确的软件可能会损坏组件(使用时选择电压要和机器人复制MADA数据时相一致)

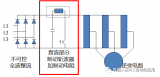
主回路输入三相交流电压后,由三相全波桥式整流,再经电容滤波后得到500V左右的直流电压,最后由SPW....
Python在资源收集、数据分析、自动化办公等领域表现很突出,可以帮我们执行一些重复、低效的工作,让....

用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服设备(由机器人以外设备控制伺服电机设备)例如:伺服铆....

SIMATIC ProDiag是用于机器和工厂诊断的完全集成的TIA解决方案。它节省了在工程阶段在C....

每个机器人的核心都是它的控制器--KUKA机器人在这方面得到了令人印象深刻的更新:未来兼容的硬件和智....
在设备名称中,两个句点之间的字符串构成一个标签。例如,标签可以是".Machine-A."。

用内六角工具或一字螺丝刀松开“锁紧传感器(Lockedsensor)”固定螺丝,在槽内上下移动至合适....
根据总线节点CPX-FB33/FB34的硬件版本(在模块的背部标签上有标注),选定CPX 图标,将它....
我第一次接触SiVArc时在奥迪Q3和A6车型,还有后来的Q5,以及VASS标准,我觉得在画面生成方....

机器人程序备份路径分为A盘 :intern ,另外一个是E盘:extern。两者的的区分在于先插入系....

平衡缸回位信号: 焊接过程时如果平衡系统没有问题时,平衡缸回位反馈E719应该是没有反馈的,而当进行....
使用“条件执行”指令,可以根据条件控制程序流的分支。该条件是结果为布尔值(TRUE 或 FALSE)....

Tech_ Buersten Referenzfahrt - [%] M2 Rechtslauf -....
FB41用于通过使用连续的变量输出在SIMATIC S7控制系统中实现技术过程控制。除了设定点操作和....

必须正确设置本节中的参数,才能使Interbus连接正常运行。插图中指定的值对应于默认设置,该设置在....

Technology 技术型:使用MOVI-PLC,依据IEC61131标准进行自由编程,MOVIT....
E718 夹紧力到位,A718夹紧,F312在旋转测试时, E834铣刀转, A834铣刀电机转,F....

在IO设备的端口属性中,选择一个具体的传送介质(例如,100 Mbps全双工的TP/ITP),然后选....

开启力监控后,力矩监控值对之后的轨迹点都有效果, 力矩监控变量$TORQMON会始终影响后面的轨迹点....

分析SMC电源故障:无电源掉网,说明US1无电,或者欠电.测量抓手SMC入端的US1电压,电压值为2....
采用该模块,可以利用最多 8 个末位位置反馈信号对提升和倾斜气缸(臂长超过300 mm )进行控制。....

通过TCP/UDP/IP在标准通道上发送非苛求时间的数据,例如:参数、组态数据和互连信息。这满足自动....
同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,一台机器人(M....






 工商网监
工商网监