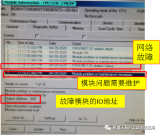
IBS网络的设置显示相应模块分配给的Interbus地址
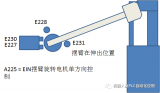
在进行测试前要根据IBS网络的设置,进行拨码开关,1选择2M ,2选择标准格式,3选择带几个电磁阀,....
机器人通过哪个端口将 WorkVisual PC 连接到控制系统上?
如果在一个 KRC4 上拆下了两个 KSP 模块,并且在其他模块的相应插接位置处又重新安上,则将出现....
INTERBUS模块的报警提示
SMC 输入模块无电源灯,没有电源指示,用机器人控制夹具气阀,有输出,更换IO模块故障依旧,因此判断....
机器人主气缸C50气管连接说明
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象。在作机器人E1轴移动时报....
用IOCTL函数可以询问机器人控制系统的节能模式?
如果生产歇工很短,为了使用状态驱动总线关闭,则可以用状态制动器已制动节能。但是,只有在机器人控制系统....
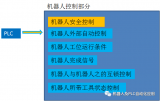
外围设备连接到机械手方面的核心作用
文件IBSPCI1.INI位于控制器的Init目录中。它包含Interbus PCI卡的参数化数据。
机器人运动过程等待条件FB SPS的结合BRAKE深入分析
如果处理中断例程的时间短于主程序中制定的轨迹规划,则机器人可不中断而继续运行。如果中断例程所需的时间....
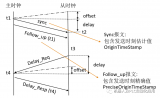
KUKA机箱内部安全组件之间通过EtherCAT和FSoE相互通讯
KUKA机箱内部安全组件之间通过 EtherCAT 和 FSoE(Fail Safe over Et....
介绍一种新的以太网通讯系统
简单一点说,PROFINET=PROFIbus+etherNET,把Profibus的主从结构移植到....
系统报警在HMI设备上所设置的语言输出
系统报警由编号和报警文本组成。报警文本中也可以包含更精确说明报警原因的内部系统变量。对于系统报警,只....
激光打标机工艺设备介绍
在U1G1PLC程序中编辑前后条码校验程序,来控制传送链放行夹具MZ12的打开,实现如果条码重复不放....
研究微分系统的整体性质及其在扰动中的变化
微分在数学中的定义:由函数B=f(A),得到A、B两个数集,在A中当dx靠近自己时,函数在dx处的极....
使用机器人自身计算值负载的重量值
TRIGGERWHEN DISTANCE=1 DELAY=0 DO SPS_TRIG(10006) ....
基于华为30年ICT技术积累和制造经验
由于缺少数字化系统对研发流程进行管理,工程师大量的时间精力将花费在不增值的活动上,导致中小企业普遍研....


关于KUKA机器人的STEP程序说明
KUKA机器人的STEP常用于机器人的各种辅助功能,如电极铣削,胶桶的摆臂,CMT的枪头清洗等






 工商网监
工商网监