在S7中组态KUKA机器人时我们会遇到很多的GSD文件版本,到底哪一个是适合我们所使用的呢?在机器人....

检查电源电压,检查中间回路配线,重新初始化驱动总线 Power Off / Power On (接通....

CASE语句用来选择几个分支程序部分之一。选择是基于选择表达式当前值的。

根据总线节点CPX-FB33/FB34的硬件版本(在模块的背部标签上有标注),选定CPX 图标,将它....

检查电缆连接以及 CI3 工艺板上的插头 XE1 (松开风扇固定件)和插头 X31 是否插接牢固。
铆接是用钢、铝或不锈钢制成的板材和型材的连接技术。•铆接技术允许通过局部冷成型连接两个或多个细金属板....
完成信号被使用在FB453的两个管角处,用来获取工位的完成信号,使其作为可以出车的条件。

使用运行系统仿真器仿真独立于程序的已连接 PLC 变量的过程值。 可使用运行系统仿真器表选择 P....

如果在定时器运行期间复位(R)输入从"0"变为"1",则定时器复位。当前时间和时间基准被设置为零。然....

可将自己新建的项目加载到 HMI设备并在运行系统中执行。 为此,组态设备和 HMI设备之间必须建立....

可以使用 TIA Portal 创建用于操作和监视机器与工厂的画面。 预定义的对象可协助您创建这些....

消息通过ALARM_S/SQ标准消息路径发送到编程设备上的CPU消息中,或发送到所连接的HMI设备上....

利用诊断监视器可针对主系统的众多软件模块显示各种诊断数据。

这意味着对于较小的应用程序,不需要PLC,因为机器人控制器可以自行执行这些任务。
不允许对使用此选件安装的SoftPLC进行自由编程。不允许使用与CD上提供的项目不同的启动项目(Bo....
HMI 系统相当于用户和过程之间的接口。 过程操作主要由 PLC 控制。 用户可以使用 HMI....
如果一个机器人与一个物件发生碰撞,则机器人控制系统将提高轴扭矩,以便克服阻力。这时可能会损坏机器人、....

有了 PLC 后,在项目中会自动创建组织块“Main [OB1]” 。 在下一部分中,您将在该组....

这几天随着CF读卡器的到来,我对DURR涂胶CPU存储卡的程序恢复工作也到了关键时刻。
使用“条件执行”指令,可以根据条件控制程序流的分支。该条件是结果为布尔值(TRUE 或 FALSE)....
winpcap提供给用户两个不同级别的编程接口:一个基于libpcap的wpcap.dll,另一个是....

ESC(Electronic Safety Circuit,电子安全回路)是一个数字电路, 用以控制....
对于轻度测试,当输出通道处于非活动状态(输出信号“ 0”)时,将几个测试信号切换到输出通道。

由C2机器人风扇故障联想到C2机器人的内部结构。

插入并组态 PLC 插入 PLC 要向项目中添加新设备,请按以下步骤操作: 1. 使用 Portal....
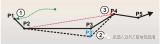
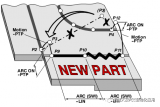
如果应优化运动的序列并且为此目的重新示教各个点,则通过逆向启动键经常使用反向运行。用户沿轨迹反向运动....
BCO 是 B lock coincidence (即程序段重合)的缩写。重合意为 “ 一致 ” ....
组态一个PROFINET网络下的SMC阀导EX245模块,SMC EX245网络阀导分,铜缆和光缆口....

该变量最多可用于编程6个函数发生器。函数发生器仅对CP运动有效。仅评估主运行变量。
驱动装置接通不自动表示库卡伺服包 (KSP) 进入受控状态并且给电机供电。






 工商网监
工商网监