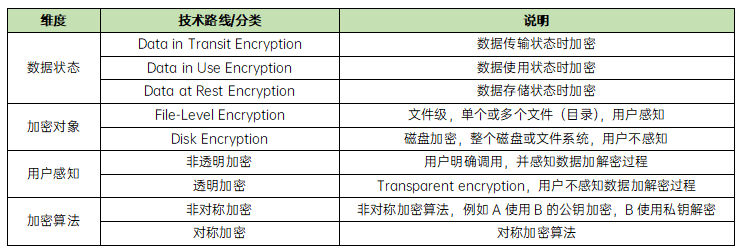
磁盘加密技术 如上节所述,Disk Encryption磁盘加密,目标是保护数据at Rest状态下....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 10:54
•1553次阅读

威胁模型 数据生命周期管理(Data Lifecycle Management)通常将数据划分为生产....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-29 10:44
•558次阅读
归一化处理 很多一开始的小白,在做电磁这一部分时,可能并不太知道归一化,只是通过滤波算法处理后就用解....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 17:45
•1102次阅读
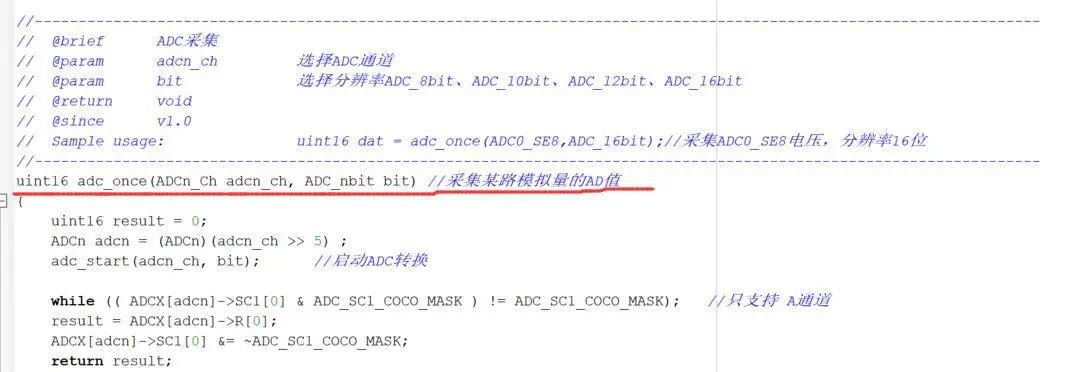
采集滤波 简单地一个adc采集获取电感的数值是远远不够,采集到的信息可能是不准确的,需要采集多次,通....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 17:42
•719次阅读
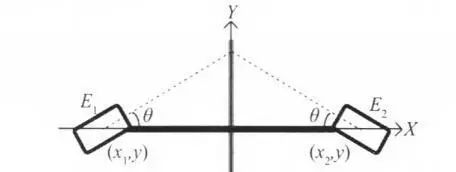
八字形电感排布方案 八字形电感排布同样也可以跟双水平电感一样,在直道行驶时保持良好的采集数据获取。 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 17:37
•1456次阅读
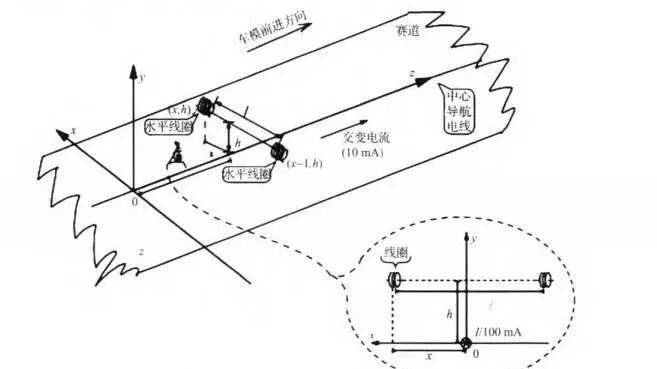
工字电感 感应赛道交变磁场,产生感应电动势,后续电路通过对感应电动势进行一些列的选频、放大、检波,得....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 17:32
•922次阅读
接下来,我们就运行一个更为直观的案例——目标检测。 在这个案例中,需要大家找一个USB的相机,连接到....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 16:41
•565次阅读
如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 16:29
•1094次阅读

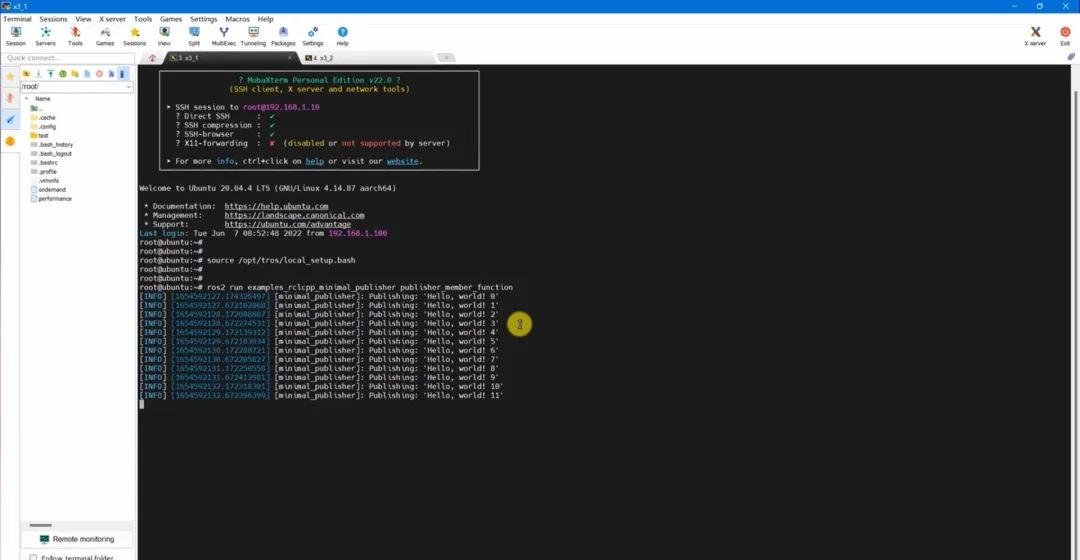
通信测试 先来测试一下TogetherROS™·Bot系统的通信功能。 我们需要启动两个终端,分别连....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 16:19
•543次阅读
PID算法的代码实现 舵机控制 在对舵机的控制中,我采用的是位置式PD算法。 将左右电感的偏差值赋给....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 15:57
•787次阅读
什么是归一化 归一化就是将所有数据都变成0-1之间的数,将数据映射到0~1范围之内处理,使数据观察更....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 15:50
•1088次阅读
采样信号滤波 什么是滤波 滤波(Wave filtering)是将信号中特定波段频率滤除的操作,是抑....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 15:43
•1395次阅读
将 XACRO文件转换成 URDF 文件 并检查 转换的方法很简单,ROS封装了实现方法,我们只需进....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 14:42
•732次阅读
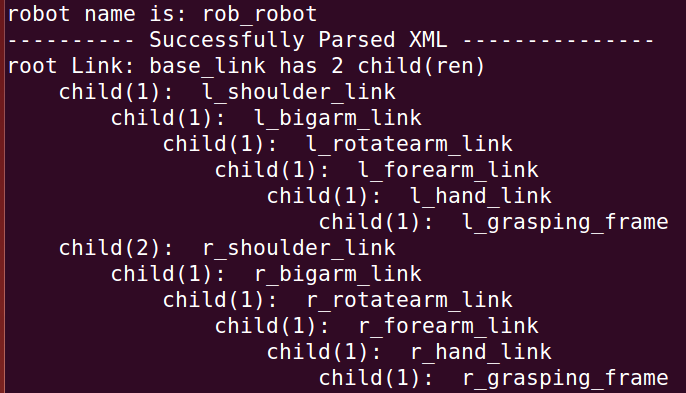
base_link的定义 base_link是所有的其他关节的基础,也就是基坐标系所在的link。 ....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 14:27
•583次阅读
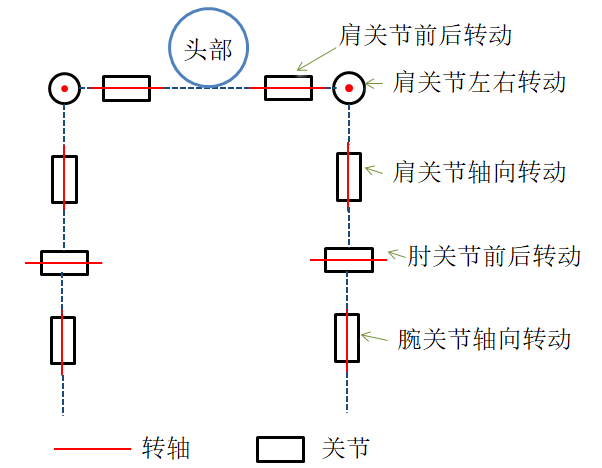
这个系列主要介绍机器人ROS模型的建立方法,ROS系统带来的好处之一就是: 我们无需自己建立复杂的数....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 14:19
•703次阅读
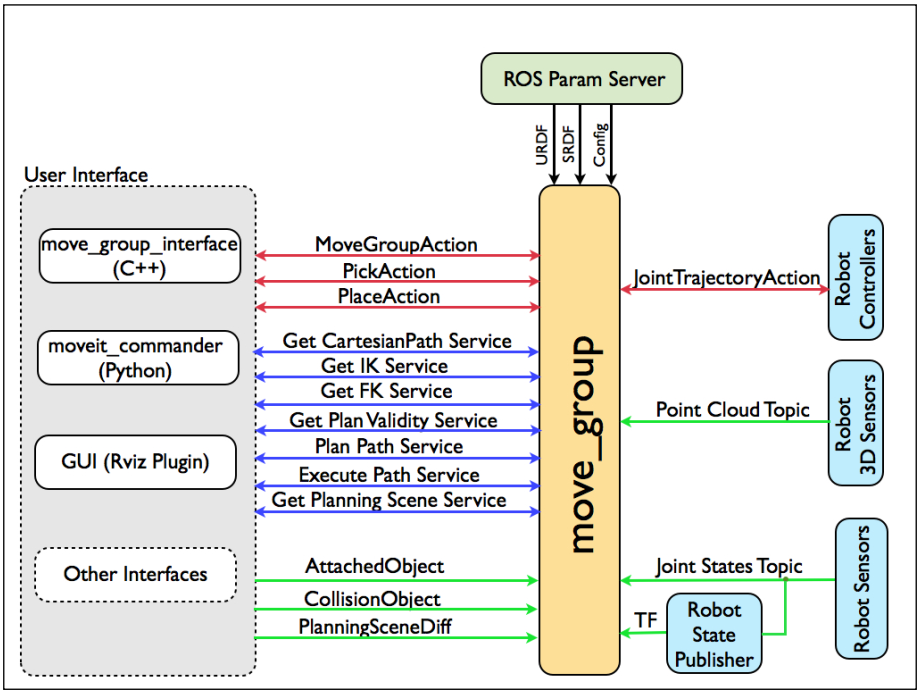
MoveIt的安装 首先确保你的Linux上正确安装了ROS系统。 安装moveit,如果不想挑战源....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:50
•1249次阅读
机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:43
•1028次阅读
匹配器 2.1 ICP点云精配准 template typename PointCloudPtr >....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:30
•556次阅读
最近在看PCL滤波配准等操作,之前在自动驾驶-激光雷达预处理/特征提取和提到了一些滤除点云等操作,但....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:24
•740次阅读
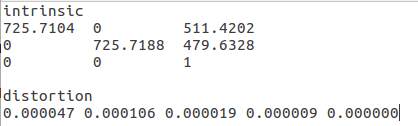
提取照片中的角点像素 首先需要把最上面获得的相机内参畸变纠正参数以下图的格式保存在 data/par....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:20
•488次阅读
提取激光雷达的角点坐标 将激光雷达的rosbag转为pcd文件 打开pcdTransfer.laun....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:15
•622次阅读

ROS功能包:livox_camera_lidar_calibration提供了一个手动校准Livo....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-28 11:09
•680次阅读

2.1 激光雷达时间序列 这一帧数据中点的排列顺序为从最高的线束到最低的线束进行排列,每条线束之间点....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 18:17
•562次阅读
激光雷达作为自动驾驶最常用的传感器,经常需要使用激光雷达来做建图、定位和感知等任务。 而这时候使用降....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 18:11
•1100次阅读
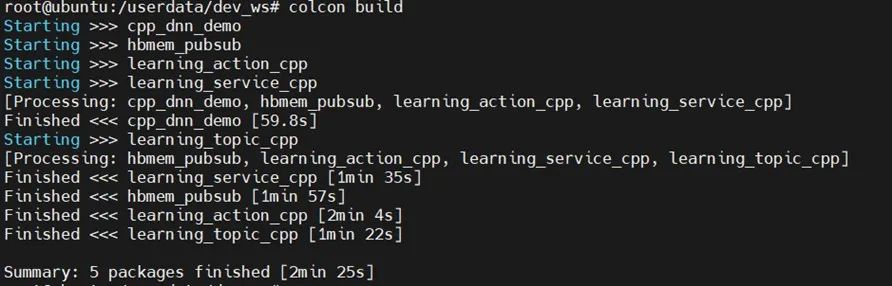
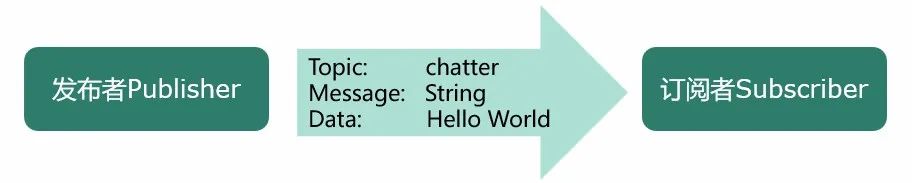
编程方法 了解了话题的基本原理,接下来我们就要开始编写代码啦。 创建工作空间 请大家先按照这个流程创....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 17:48
•434次阅读
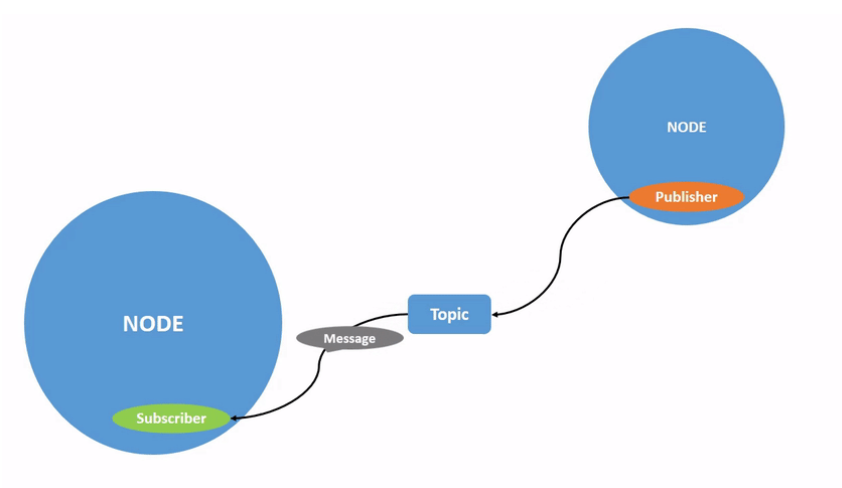
多对多通信 大家再仔细想下这些可以订阅的东西,是不是并不是唯一的,我们每个人可以订阅很多公众号、报纸....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 17:42
•880次阅读
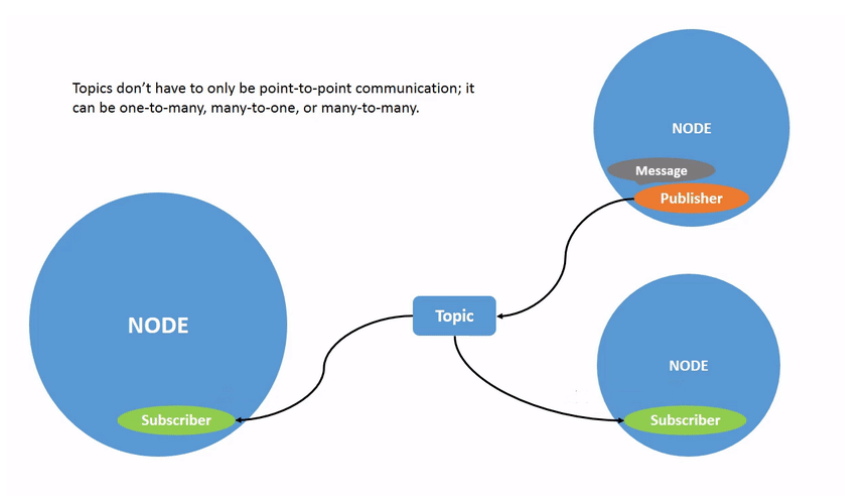
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 17:25
•732次阅读
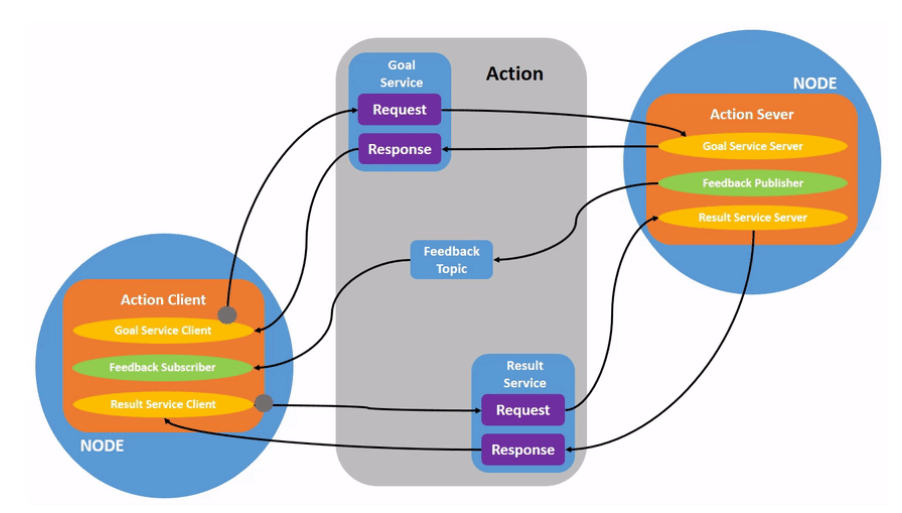
编程方法 相比之前话题和服务的程序,动作通信的例程相对较长,我们一起来运行并分析一下。 运行示例程序....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 17:10
•503次阅读
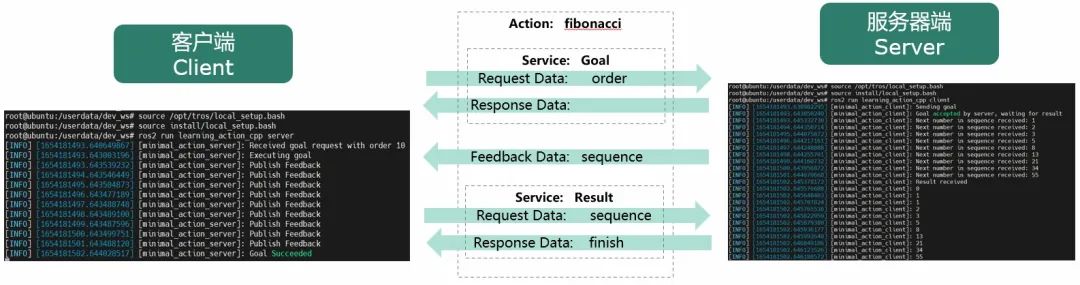
机器人是一个复杂的智能系统,并不仅仅是键盘遥控运动、识别某个目标这么简单,我们需要实现的是送餐、送货....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 17:05
•721次阅读
编程开发 为了方便大家使用,TogetherROS针对零拷贝功能进行了封装,风格类似ROS2中话题通....
![的头像]() 麦辣鸡腿堡 发表于
麦辣鸡腿堡 发表于 11-27 16:55
•603次阅读












 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1













