


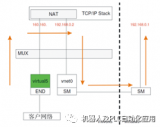
KUKA机器人PN网络设置的限制
为了使外部PC能够通过网络连接到机器人控制器,必须对KLI进行配置。例如,这是能够通过网络将Work....


S7-200模拟量使用应该搞清的16个基本问题
同一个模块的不同通道是否可以分别接电流和电压型输入信号? 可以分别按照电流和电压型信号的要求接线。但....

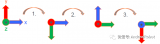
KUKA机器人固定焊钳的铣削控制
-当有铣削时出现圈数故障时,会先把摆臂摆回,然后停在66步等待复位,如果复位会返回到第51部,重新铣....

KUKA机器人对于涂胶设备的清胶控制
F346激活原位清胶,!A15机器人在原位和F356固定涂胶,或者F356固定涂胶和E2115摆臂在....
KUKA机器人力矩监控变量的控制使用简介
变量$TORQMON包含程序模式下轴转矩的当前公差范围。该公差范围是使用文件…STEU Mada $....

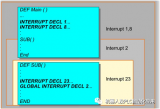
VW大众标准中BAS()程序的使用浅谈
IF (($LOAD.M0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0....






TOPEX激光RFID标签系统设备
在U1G1PLC程序中编辑前后条码校验程序,来控制传送链放行夹具MZ12的打开,实现如果条码重复不放....
PFO飞行热熔激光焊接
机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此....
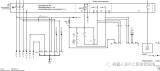
WINCC面板的关闭/打开SV及KV柜Q1主空开的控制原理
If (R_TRIG_SK90_ZutrittAnfo.Q Or F_TRIG_K90_Zutrit....
滚床出车完成信号没清故障
首先找到故障点,09CD010F,对故障码进行拆分:09CD16进制转十进制DB块2509,01不变....





 工商网监
工商网监