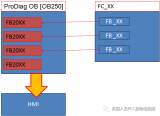
KUKA程序中"DEF "与" DEFFCT" 的区别
局部子程序允许多次调用
局部程序名称需要使用括号
运行完毕局部子程序后,跳回到调出子程序后面的第....
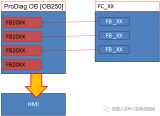
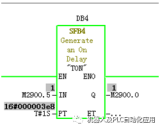
KUKA机器人练习:制作一条报警信息!
#VALUE : 参数直接以传递的形式代入信息文本中 (即作为字符串、INT、REAL 或 BOOL....

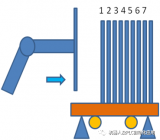
FB 464控制卷帘门
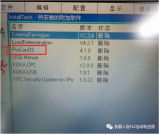
为了实现无 "SxxV" 运行,必须设置"Cfg Bit 00",以确保错误确认的正确完成。卷帘门....
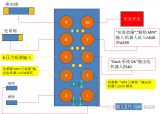
抓手USER:TECH2_ Koll_Ueb 过载报警设置
WHILE((PAR4<1) OR (PAR4>40)) --检查P4的补偿值-是否在(1-40)之间
KUKA-8.3系统电伺服焊钳的更换电极测量与铣削后测量的过程分析
更换电极时测量和铣削后测量使用的同一USER程序,只是功能选项不同。
KUKA CELL()程序的分析解读
CELL的功能:只能检测是否在原点,PLC给入的程序号是否正确,打开FOLGEN程序。
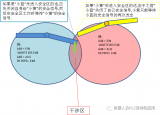
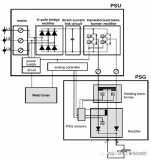
控制系统PC机中的安全控制系统
用于访问防护区的输入端。在自动模式下,信号触发 Stop 1。即使任何一扇防护门关上,机器人也不允许....


C4机器人与PLC的通信IO域更改扩展
数字输出先在PLC 端被写入 输出存储器,然后才被传输。PLC的数字输出在KRC4 端被存放在输入....






KUKA机器人如何声明变量
变量声明需要关键词 DECL,对四种简单数据类型关键词 DECL 可省略[1.整数 (INT) 2.....

KUKA机器人电伺服焊钳力的建立过程
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnu....





 工商网监
工商网监